ステッピングモーターを回す方法(とりあえず回すだけ)
準備したもの
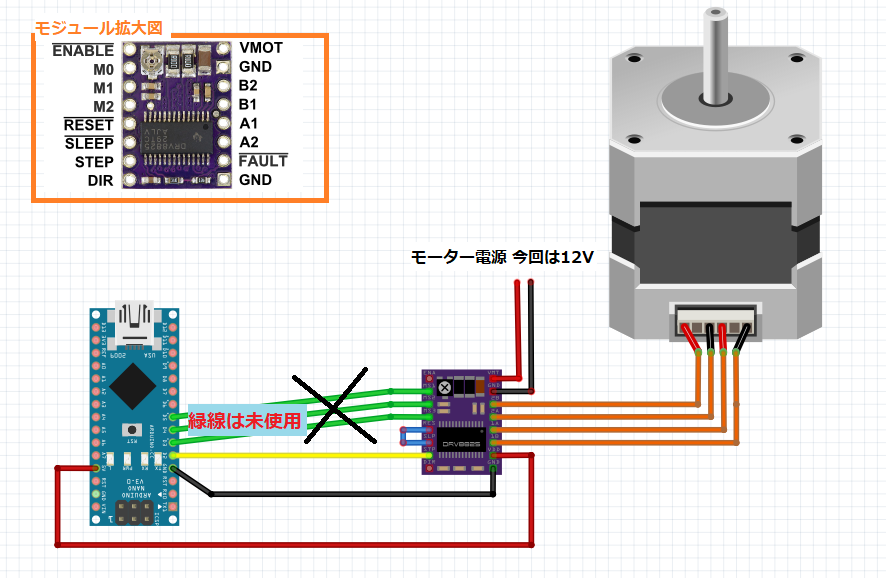
- ELEGOO Arduino用 Nanoボード V3.0 CH340/ATmega328P、Nano V3.0互換 (3)
- Ren He ステッピング モータドライバ モジュール DRV8825 3Dプリンタ 3Dプリンタ対応 ヒートシンク付き 5個
- 適当なステッピングモーター
配線
プログラム①
DRV8825ドライバのSTEPピンにパルスを送ると、1パルス=1ステップで回転するので
ArduinoのD2番ピンと接続をして半周期500ミリ秒、訳1秒で1ステップずつ回転させるためのパルスを生成するプログラム
変数 motor_delayの値を変えることで回転速度を変更できる。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
const int motor_pin = 2; int motor_delay = 500; //パルスの1/2周期 単位ミリ秒 void setup() { pinMode(motor_pin, OUTPUT); } void loop() { digitalWrite(motor_pin, HIGH); //2番ピンをHIGHに delay(motor_delay); //motor_delay ミリ秒待機 digitalWrite(motor_pin, LOW); //2番ピンをLOWに delay(motor_delay); //motor_delay ミリ秒待機 } |
プログラム②
もう少し早く回したいので、ディレイの時間を delay(ミリ秒単位)から delayMicroseconds(マイクロ秒単位)に変えてみる
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
const int motor_pin = 2; int motor_delay = 600; //パルスの1/2周期 void setup() { pinMode(motor_pin, OUTPUT); } void loop() { digitalWrite(motor_pin, HIGH); //2番ピンをHIGHに delayMicroseconds(motor_delay);//motor_delay μ秒待機 digitalWrite(motor_pin, LOW); //2番ピンをLOWに delayMicroseconds(motor_delay);//motor_delay μ秒待機 } |
筆者の環境では、motor_delay の値が500マイクロ秒付近で脱調してしまう。
コメント
Yet they had been milking every little little bit of depth that they could from that poundage.
For your last two sets of the incline bench press you will be doing
drop units. You will start with the same weight that you used for the earlier three sets.
This will hold the tension on the pecs throughout the whole movement.
These are isolation exercises that help to develop the muscular tissues you’re not essentially hitting within the
massive three lifts. Since placing this exercise
routine on the market again in 2010, I’ve gotten tons
of feedback from literally thousands of individuals.
This frequency permits you to stimulate muscle fibers extra effectively whereas giving them adequate restoration time.
Understanding the method to manipulate volume is vital for maximizing positive aspects.
If you notice stagnation, think about adjusting the number of units or reps,
and even the type of workouts you carry out.
This can present the stimulus needed for continued progress.
When designing a coaching cut up, focus on a few key principles.
These principles ensure that your exercises are efficient and that you can recover correctly.
Make sure your muscle tissue have sufficient time to recover between classes.
If you’re a newbie, take a look at any of those three applications.
They’ll introduce you to weight training with the best workouts and
put together your body for extra advanced routines like a push
pull legs split. Building a wide, thick, detailed
back isn’t a brand new concept revealed solely to modern-day
bodybuilders like Ronnie Coleman, Jay Cutler, and Phil Heath.
Arnold, Franco Columbu, and others they educated with additionally knew the importance of the back
double-biceps and lat spread poses for winning
major competitions.
Selecting the best exercise break up for your wants can be robust, as
there are lots of to select from. Nevertheless, one of many newer splits to realize in popularity up to now few years is the push, pull, legs
workout, also called a PPL break up. We’re going to
break down this unique training cut up, show you how to use it to optimize
your gains, and even provide a workout.
Because some muscle groups do not have plenty
of compound or isolated workout routines to choose from,
you need to use the ones already listed must be sufficient to work off
of. Finally, all the workouts have a link to a video the
place the exercise is carried out. This is till I build a library of my own with visual demos of workout routines.
For example, let’s say that you’re doing barbell curls –
your average weight with which you’re able to doing 8 repetitions
is 45lbs.
To build muscle safely and successfully, you’ll have to
give attention to exercising particular muscle
teams with reasonable to heavy resistance
for no much less than four to 12 weeks and past. You’ll also want
to seek out ways to arrange your muscular tissues for the
work forward and learn how to assist them recover with the right meals
and life-style changes. However let’s be real—tracking volume, adjusting splits, and guaranteeing you’re progressing can get sophisticated.
This is particularly useful for advanced trainees, as one day of relaxation per
week is generally not enough for most people.
His exercises lasted hours, with a seemingly endless number of workouts and sets.
It was the epitome of high-volume training, a mode of understanding criticized
by most training experts at present as not permitting adequate muscle
recovery. In the next slides, you’ll see—body part by physique part—the actual exercises the Austrian Oak carried
out whereas in the prime of his career, when he was the undisputed king
of bodybuilding. I imagine one of the best exercise plan for bulking is one which emphasizes consistency
over complexity. You don’t want a dozen variations of the
identical motion; you want mastery of the fundamentals.
Having a clear and structured exercise plan is essential when aiming to bulk
successfully.
If you need to crush PRs, add slabs of muscle, or shed pounds, KIZEN
has the proper program for you. The program incorporates parts of useful hypertrophy
with managed eccentrics, varied gear, and a stability
of volume and depth. This could possibly be from lacking training classes
and/or dishonest on your diet, therefore creating too great a surplus.
A bone density scan, or dual-energy X-ray absorptiometry (DXA) or bone densitometry, can precisely calculate body fats.
Alternatively, have knowledgeable skinfold assessment, preferably by someone accredited by the famend Worldwide Society for the Advancement of Kinanthropometry (ISAK).
Observe general energy and macronutrients to make sure you’re hitting key targets.
Overlook to track them and you threat eating too
much or not sufficient.
You can shoot for a 10-rep max one week on one raise after which an eight-rep
max on one other lift the following week. You can work
all the way down to a one-rep max over time or play it protected and stay within 5 to eight reps;
it’s up to you and how far you wish to push your energy gains.
Simply be aware that repeatedly training very heavy (five-rep
maxes or heavier) shall be tense and will require occasional
deloads. As Quickly As you reach the load that permits you the number of reps
you’re taking pictures for but no more, you’re carried out with that lift for the
day. Constructing muscle isn’t nearly lifting
weights—it’s about training sensible, staying consistent, and balancing depth with recovery.
This exercise plan is inspired by Dr. Pak and designed around training each muscle group 2-3 occasions per
week, as discussed within the article. It’s constructed for maximum hypertrophy, combining compound
and isolation workouts with an efficient quantity and frequency steadiness.
Consider implementing maintenance weeks or gentle mini-cuts
if essential. This means your waist in centimeters should be half your height in centimeters.
This will assist you to perceive your average weight
adjustments.
With exercise and dietary plans normally, you need to attempt to
strike a steadiness of carbohydrates, healthy fats and
proteins. While wholesome fats aren’t essentially tied to muscle
building, they’re a great source of energy, along with carbs.
Early on, you’ll probably expertise some lingering soreness.
In this coaching guide we take you through a challenging, results-driven weekly workout routine designed for intermediate to advanced degree lifters.
As talked about, yow will discover this push exercise out there free of charge
in the app or just click right here. You just need to begin the workout,
add the weights you are using in your first exercise,
and then try to beat them the following time. If you are trying to lose fat but need to build or a minimum of keep your muscle mass whereas you’re at it, you
need to positively check out our guide on tips on how to
lose fats and keep your muscle.
Innovations like MyFitnessPal can show invaluable for tracking
energy, hitting macro targets, and incorporating larger
food decisions. You should additionally keep away from utilizing momentum
to deliver the burden up. That applies to all workout routines but is a key purpose that
most people fail to get any benefit from this explicit motion. After six reps,
pause in the backside squat place for 3 seconds.
The five-by-five program is one that is quite well-liked
amongst those who wish to achieve a high amount of power and muscle
mass. There are no supplements that can both build muscle or
burn fats for you. Avoid dietary supplements that declare to
be muscle constructing, testosterone boosting or fats burning.
Exactly how shortly you will gain muscle mass is impossible to know beforehand, as the individual variation is big.
This is a true full-body exercise that instantly hits your hamstrings, decrease again, lats, rhomboids,
trapezius, deltoids and biceps. In this exercise, you’ll be doing a twist on the standard deadlift
rep scheme that can ramp up the depth over 6 units of 6 reps.
A exercise that includes heavy compound exercises with a mix of isolation exercises and overall quantity (more units and reps).
I’ll clarify why below, however first let’s take a look at what a
easy bodybuilding exercise appear to be. This part continues to make use of a four-day
break up, however bodyparts are paired differently—namely, chest and back are trained on the same day (Day 1),
as are biceps and triceps (Day 4). This
is little greater than a means of adjusting issues up,
giving your muscular tissues a barely different stimulus to spark new muscle growth.
The push press is a great addition to any push-day exercise when you need
to incorporate a bit more power and athleticism.
If you want to only do one shoulder train, the overhead press is a great choice,
which is why it is included in a lot of our shoulder workouts.
That’s why we’ve compiled a list of the 10 greatest shoulder workout routines for
muscle and power. Not only do well-developed shoulders improve your physique, but they also play an important function in higher physique strength and total athletic performance.
It’s best to begin out with lighter weights after which increase load
as you move to the second and third units. Check out all our exercise routines in our full listing of coaching programs.
You can also perform the close-grip bench press in a Smith machine.
Doing so removes the steadiness requirements and permits you to concentrate on working along with your triceps, which is often a profit if your goal is muscle hypertrophy.
Some people can build bulging biceps without isolation exercises, as a substitute relying solely on back compound exercises to target the front of
their higher arms. However, most of us should do at least
some curls to get these weapons to develop. Traditionally, compound exercises are considered simpler than isolation workouts for growing maximal power.
You can’t carry the same 10-pound dumbbell eternally and expect to maintain adding
much muscle and power. Full-body workouts are sensible for building
muscle and growing strength. They provide a potent stimulus for fats loss too, because of the cardio-like effects in your physique.
The first time you do that push workout, you must attempt to find weights that let you carry out
the prescribed number of units and reps with good kind in each train. This
is as a outcome of longer relaxation intervals
enable us to perform more reps in the subsequent sets. More reps mean more coaching being
accomplished and more stimulus for the muscular tissues to
develop. To compensate for shorter relaxation periods, you’d want to increase
the variety of units you do.
Full Body coaching is efficient for beginners, however may limit muscle-specific focus compared to more specialized splits.
If you need to take the guesswork out of your training and start building muscle
smarter, not more durable, try Dr. Muscle. Bounce
off the bed the following day with pleasure, figuring out that you will smash your workout.
As you head out the door, your psychological depth degree should be at about 7 out of 10.
Driving to the fitness center, see yourself successfully completing your max lifts once more, and
dial it up to a 9. Then, as you emerge by way of the gym doors you should be raring to assault the weights at a ten.
Additionally, extra calories can boost your power levels, making you’re feeling like a dynamo within the fitness
center. You can then put this energy towards extra-intense workouts
that kickstart your muscle hypertrophy and power features.
If you don’t nudge them off the couch (or the coaching bench, in this case),
they are sluggish to get moving. Progressive overload is that
nudge, forcing your muscle tissue to get with
the program and begin rising.
Most people additionally find that they turn into hungrier
while following this program, which is consultant of the intense nature of it.
I’m going to wrap this article up by answering some widespread questions on gaining muscle.
When substituting workouts just be sure you observe the (Mass) and (Isolated) markers.
For instance, you swap your Bench Press (Mass) for Decline Bench Press (Mass).
Quite than Bench Press (Mass) for Cable Flyes (Isolated).
When it comes to choosing what meals to eat, a registered dietitian can advise you particularly.
Stop by my web-site; what do steroids do to your body
Nonetheless, there are many variations for each cable presses and cable flys.
Whereas the pec main is one muscle, anatomically talking it
has two distinct units of muscle fibers. This is why you’ll often hear people saying “this train is sweet for the upper chest”.
This train mimics the flat bench dumbbell fly, but again, it offers constant rigidity throughout.
Sure, building your chest within the fitness center does make issues a
little easier, however due to the push-up (and its wide selection of variations), there are nonetheless ways you can practice your chest at home.
Upper physique power, elevated bone health, higher pushing energy, and total joint
well being are improved via flat bench presses with a barbell.
However anyone who desires to coach for a balanced, wholesome physique
will understand that you need to train smart, not like a meathead (at
least not all of the time).
From my coaching experience, the barbell bench press is a basic raise I at
all times advocate for building chest energy. Drop right into
a plank place, together with your core tight and arms on your dumbbells.
Keep your elbows at a 45-degree angle to your body as you push back up
explosively. Lay flat in your again with your knees bent and your toes flat on the bottom.
These movements will assist construct energy and definition in that space.
Don’t get us mistaken, bench press is a particularly effective method to build muscle, however
by ignoring other chest exercises, you’re leaving lots on the table.
Meta-analytic findings suggest that various angles,
stability calls for, and resistance levels all contribute
uniquely to muscle activation and energy improvement in chest exercises.
A balanced routine incorporating a quantity of bench press variations
and resistance ranges provides comprehensive chest muscle engagement and energy positive aspects.
Cable crossovers are fantastic for achieving a deep stretch and consistent pressure throughout the
chest muscle tissue. These cable chest workouts provide a satisfying pump, although progressive overload
may be extra restricted than with presses.
In order to totally hit the chest, we’ll need to choose exercises that observe
the completely different orientations of the fibers. Every of these exercises is missing a full adduction of the shoulder.
Correct warm-up is vital for optimum efficiency and harm prevention. Prioritizing good type over lifting heavier weights yields higher long-term outcomes.
Avoiding frequent errors drastically improves outcomes and
minimizes the risk of injuries. Skipping warm-ups, utilizing poor form,
and overloading weight are frequent errors that hinder progress.
The cable decline press can be accomplished standing/kneeling by merely setting the handles on the high (or near
the top) of the towers after which urgent down and inward
at an angle. OR, you possibly can set up a bench in a decline place to
imitate that of a decline dumbbell or barbell press.
With the bench, you possibly can actually hone in in your pec main, and extra specifically, the lower head,
as decline presses do. The bench press using cables is a good method to goal
your chest with constant pressure all through the entire vary of motion.
It will certainly penetrate your pec main in a singular method,
which is normally a good change should you at all times use barbell or dumbbells.
Furthermore, since your shoulder blades are free, extra protraction can occur,
permitting you to get a larger contraction of your
pecs and extra activation in your serratus anterior.
With just a resistance band, you can carry out push-ups, flyes,
presses, and more to build upper physique power.
The barbell decline bench press is superb for strengthening your
lower chest muscle tissue. It’s a variation of the flat bench press, a preferred chest exercise.
In our article on chest training, we’ve put together a exercise that
not solely targets your higher chest, but additionally your center and
lower. Seeing as your upper chest muscle tissue are only a small a half of your complete
chest, we usually advocate that you simply prepare your whole chest
throughout your chest exercises. Cable exercises are great for constructing and
strengthening your pectoralis main, which is the muscle that makes up the majority of your chest, in addition to helping
with chest fat loss. The cable crossover machine allows for a
wide variety of chest exercises thanks to its capacity to govern angles
and alter attachments.
References:
steroid pills for muscle gain (Carmelo)
70918248
References:
Steroids Trenbolone
70918248
References:
the best steroid on the market (Consuelo)
Our mission is to offer entry to the most effective compound treatment
solutions for patients, practitioners, and pharmacies. We
supply all our medicines and lively pharmaceutical elements from FDA-registered suppliers and producers.
Anavar is probably considered one of the most typical and recognizable brandnames in terms of advertising oxandrolone.
It is the lively ingredient that makes up Anavar,
and is what our high-quality Anavar is created from to make sure superior results.
The thousands of views on YouTube, TikTok, and Instagram videos mirror the appreciable number
of women and men keen to buy and verify out Anavar. Testosterone Cypionate, for instance, is a crucial component of hormone alternative therapy, serving over
10 million Americans over the age of forty yearly.
Regardless of your circumstance, we’re right here that will
assist you decipher the confusion of the world wide web and share our high tips for getting Anavar online.
Have spent considerable money and time on “authorized alternatives” with comparable names
with out seeing any results. In today’s fast-paced world,
keeping up with every day calls for can be exhausting.
We typically battle to stability work, personal life,
and well being, which leads to decreased energy and stamina.
Verify out our different informative guides on steroid use and purchasing
in varied different nations. We have compiled a
listing of the highest Anavar brands available on the market available on the market and
contrasted their prices in your ease. After you
have made the choice to buy Anavar, you have to discover a dependable provider who can ship it to you.
Anavar and all anabolic steroids are basically types of exogenous testosterone; thus,
Anavar will enhance muscle mass. When it comes to
buying Anavar online, the source is just as important as the brand.
With so many online shops claiming to promote real merchandise, it’s
simple to fall into the entice of purchasing counterfeit or low-quality steroids.
When it comes to purchasing Anavar, it’s essential to decide on a good brand to ensure quality and
effectiveness.
The mixture of affordability and effectiveness it
brings makes Oxandro 10 an incontestable leader in its sector.
If you’re looking for a efficiency enhancement resolution without breaking the bank,
Oxandro 10 from Magnum Pharmaceuticals should prime your record.
Choosing the right Anavar cycle and dosage is important to maximize results while minimizing
unwanted effects. Whether Or Not you’re new to anabolic steroids
or an experienced consumer, this guide provides the best cycle constructions
for both men and women seeking to enhance fat loss,
strength, and lean muscle definition. Then, when the pill is within the “safer” part of the intestine (upper intestine), the nutrients begin to be launched into the system and proceed to be launched steadily over a two to eight-hour interval.
Thus, common prescriptions for bodybuilders and athletes had been no longer issued.
We find that when bodybuilders administer Anavar, they sometimes expertise
an increase in well-being, confidence, motivation, and aggression. This is as a
end result of of exogenous testosterone supplementation;
nonetheless, once a cycle finishes, users typically expertise fatigue and reduced libido.
Research has proven anabolic steroids improve dash pace in rats by up to 29% (14).
For those seeking to purchase Anavar from respected
retailers, five reliable sources have been identified.
Pure Anabolics and Steroid Warehouse both offer high-quality merchandise with rigorous testing for purity.
Muscle Achieve Pharmaceuticals guarantees clear
dosage tips and transparent enterprise practices.
Fitness Lab Supplements is understood for its solid
business monitor report, while Elite Efficiency Gear provides detailed product information and
lab outcomes. Every vendor prioritizes buyer satisfaction, quality assurance, and discrete shipping
strategies, confirming your purchase is legitimate and
safe. Finest Gears has earned its place as a trusted source for anabolic steroids like Anavar.
Power begins to rise steadily, especially when Anavar is stacked with testosterone or
Winstrol. Water retention stays minimal, permitting for a dry, aesthetic look.
In this occasion, customers may also experience water retention and bloating, which
Anavar doesn’t trigger, plus heightened anabolic results.
When you buy Anavar from Pharmaqo, you’re investing
in a product with verified purity, efficiency, and safety, supported by Pharmaqo’s dedication to high quality and buyer care.
Available in 10mg and 50mg options, Pharmaqo’s Anavar meets the needs
of latest users and seasoned athletes. Navigating the Anavar market in 2024
requires diligence and informed decision-making. By researching reputable suppliers, identifying high quality products, and adhering to
secure purchasing practices, you possibly can minimize risks
and improve your bodybuilding journey. Always prioritize your health and safety above all else, and seek
the advice of with a healthcare professional before beginning any new complement regimen. With the best strategy, you presumably can take
pleasure in the advantages of Anavar while ensuring a protected and responsible experience.
Clomid can be not a good PCT for ladies,
as it could trigger the ovaries to become oversensitive.
DHEA has been used constantly for 4–6 months in trials (25), which is ample time to recover endogenous testosterone in women. There have been no dosage directions specific to ladies when Anavar was first launched.
The solely caution was that pregnant women should chorus from utilizing the
drug. Today, Anavar is against the law for leisure use in virtually each nation on the planet, except Mexico,
where it might be bought at an area pharmacy. In one examine, men with HIV acquired
20 mg of Anavar per day for 12 weeks. Approximately
a decade after Anavar came on the market, there was promise of it being a drugs
to successfully deal with excessive cholesterol.
There are many places that sell steroids online, but not all of them are reputable.
The black market is a thriving industry that gives quite lots
of illegal services. In most international locations, it is illegal to
buy and use steroids without a prescription. Sure, you
ought to purchase Anavar online from various web sites and online
stores. However, it is important to be cautious and do your analysis to ensure
you are buying from a reputable and trustworthy supply.
References:
Heavy r illegal
Trenbolone is particularly known for its capacity to boost power considerably.
This strength increase is not just limited to
muscle mass but also includes enhancements in muscle endurance and energy.
In weightlifting and bodybuilding, an increase in energy allows
customers to raise heavier weights and carry out
more repetitions, both of which contribute to
muscle development and higher performance. A unique facet of Trenbolone is its capacity to
extend red blood cell production.
Australia has strict legal guidelines governing anabolic steroids, together with
testosterone and trenbolone. They are categorised
as Schedule 4 substances in the Poisons Normal, which means they are prescription-only medications.
In Australia, doctors can prescribe testosterone to treat conditions related to low testosterone,
but leisure or performance use is unlawful. Like in different
nations, trenbolone just isn’t approved for human use and is
mainly utilized in veterinary medicine.
Tren Hex is nice for bulking, energy, and lean mass positive aspects however can also be highly effective for
slicing and fats loss. It does not aromatize into estrogen,
so there is no bloating or water retention, and
it can deliver a tough, vascular physique with the right diet.
Overall, the results of Trenbolone cover varied elements
of muscle development, energy, and fat loss, making it
a well-liked choice amongst bodybuilders and athletes.
However, it’s important to remember that these advantages include
potential side effects, and improper use could lead to serious health risks.
There are no dosing or administration guidelines out there for Trenbolone Acetate
in a therapeutic capacity. Bear In Mind, Parabolan (Trenbolone Hexahydrobenzylcarbonate) is
the only Tren compound ever accredited for human use.
This is due to it rising amino acid uptake and protein synthesis in fast-contracting muscle fibers (whereas testosterone
does not). After a tren cycle, we usually see low testosterone ranges inflicting
lethargy and diminished sexual function, as properly as
despair. These unwanted effects can last several weeks
or months, therefore why we recommend bodybuilders opt for
aggressive PCT (post-cycle therapy). Without wholesome ranges of testosterone, muscle mass starts to vanish
rapidly which can lead to vital problems for athletes
or bodybuilders. Trenbolone is a powerful anabolic steroid that may produce spectacular outcomes when it comes to bulking and cutting for health lovers.
Its potent anabolic properties assist protect lean muscle mass, permitting
you to get stronger even when decreasing caloric consumption for a
chopping cycle. From improving general performance to growing muscle mass and power levels, Tren is the go-to choice
for health fanatics who demand the perfect from their exercises.
One medical study found that tren users have been 3 times more likely
to die than non-users over the research interval.
See how Jaco’s veins are popping left, proper and centre within the
after picture and the way full his muscles look even when competing on stage (where
many bodybuilders look depleted). However, others say Tren does nothing to burn fats as a end
result of that’s what’s happened in their own private expertise.
Combined with Trenbolone, you’re going to be doing plenty of facet effect administration.
The cycle sometimes lasts for 8-12 weeks, relying on the user’s targets
and expertise. A Trenbolone cycle is a steroid cycle during which the bodybuilder takes trenbolone
as a drug to advertise muscle progress. This implies that Trenbolone does not trigger water retention or fat accumulation throughout a
cycle, unlike other bulking steroids. Trenbolone doesn’t convert to estrogen, so customers
won’t expertise water retention or fats accumulation during a cycle.
If you’re seeking to pack on severe muscle mass, then Tren is the steroid for you.
This powerful anabolic steroid can help you blast through your coaching plateaus and
achieve the positive aspects you’ve always wanted.
And these positive aspects come on very fast as a result of Trenbolone Acetate is
a quick-acting steroid. You might not hear so much in regards to the cardiovascular unwanted facet effects of Trenbolone, but they definitely exist.
What we mostly mean by these unwanted side effects
is that they impression ldl cholesterol and blood strain. Fortunately, this
explicit side effect is well avoided as a outcome of it comes about
on account of your Tren dose being too high and not enough exogenous testosterone being equipped to fulfill your needs.
The cause for this is that testosterone is a less
toxic anabolic, so it can be stacked to
reinforce positive aspects without making trenbolone’s unwanted facet effects dramatically
worse. None of the next trenbolone cycles are suitable for novices, as it is a very harsh steroid
that causes extreme unwanted effects in lots of customers.
Trenbolone is probably considered one of the most potent anabolic
steroids, both by method of results and unwanted side effects.
We have found that isotretinoin, better known as Accutane, can help bodybuilders who suffer from
acne however wish to experience the benefits of trenbolone (or different androgenic steroids).
Hi, I Am Dave Moffat the founder and Chief Editor of steroidsourcetalk.com and licensed
Worldwide Private Coach and Licensed Nutritionist.
AIs block the conversion of testosterone into estrogen, which may worsen cholesterol levels.
However, SERMs work by directly inhibiting estrogen’s results in the mammary glands without affecting aromatization. Some of those trenbolone cycles
are extraordinarily harsh, and we have discovered
them to be very damaging to the physique (at least within the quick term).
The risk of androgenic unwanted effects, such as hair loss, acne,
and prostate points, is also excessive. Like trenbolone
acetate, Anadrol is fast-acting, so features can be
observed in only a few days following the primary dose.
The addition of Anadrol will result in significant mass and strength
positive aspects.
Despite this, individuals began utilizing it for quick muscle bulking, accepting the
risks of an animal-intended product. The Trenbolone hormone
itself was first created in the late Sixties and the Acetate version would
be bought under the names Finajet and Finaject. For optimal outcomes, Trenbolone should be paired with
a disciplined method to training, diet, and recovery.
Trenbolone, nonetheless, is rarely—if ever—approved for
medical therapy in people and is not prescribed
for human use. Dosages and cycle length range relying on the objective, with
larger doses and longer cycles for bulking and lower doses and shorter cycles for cutting.
Proper diet and training are key to maximizing the benefits of every kind of cycle whereas managing
dangers.
References:
anabolic steroid in sports
Testosterone should be included in a complicated Anavar (Oxandrolone) cycle, even if at
only a maintenance dosage of 100mg weekly with your chosen ester, with propionate
or enanthate being frequent choices. A entire range of other steroids are generally stacked with Anavar,
together with the powerful fats burner Winstrol,
Equipoise, Proviron, Masteron, or Primobolan. Anavar excels at giving you important enhancements in aesthetics – leanness, hardness, dryness, and, in brief,
getting ripped and shredded.
Dosages might vary, and periodic breaks from the treatment
might be needed. It’s often used alongside different therapies, so
make sure you understand your full routine. Inform your doctor or pharmacist in case you
have any allergy symptoms before utilizing Anavar
steroid. This product might comprise inert ingredients that can cause allergic reactions
and other issues. Oxandrolone is the scientific compound name, while Anavar is simply the brand name of the Oxandrolone drug produced by
pharmaceutical firms. Unauthorized possession or use of Oxandrolone for non-medical reasons may end up in criminal charges and penalties,
together with fines and potentially imprisonment. When You’re on the lookout for particular cycle suggestions, made
personally for You – contact us!
Oxandrin additionally will increase red blood
cell counts, main some endurance athletes to experiment
with this drug to boost their efficiency.
There are many optimistic results that may be attained through an Anavar cycle, starting
from the muscle-building benefits that we’ve already mentioned to
therapeutic wounds. So oxandrolone actually
has a big selection of advantages for both bodybuilders and
medical patients. An Instance of an Anavar or Oxandrolone solely cycle can be
60-80mg daily for 5-6 weeks in males and 10-20mg every day for 4-5 weeks in females.
A well-balanced food regimen is also key, excessive in protein, common cardio,
blood tests, balanced coaching program, and intake of loads of water to restrict organ stress.
When DHT’s are used, they will trigger the prostate to enlarge or trigger issues
on this area.
We recommend to begin of by taking 5mg of Anavar per day for
3 to four weeks, and look how this anabolic steroid works out for
you. Relying in your response to the Anavar, you probably can maintain including extra
to the dosis in the course of the remainder of your cycle.
Only only a few amongst many customers have point out that they skilled severe unwanted aspect effects while utilizing Anavar.
Even though women would possibly get hold of outstanding outcomes whereas using Anavar on its
own, males may have to make use of some extra anabolic steroids so as
to obtain the very best end result.
Dianabol may be stacked with trenbolone; nevertheless,
it typically causes bloating and thus counteracts trenbolone’s
diuretic properties (similar to Anadrol). Regardless Of the fact that Anavar is an oral steroid, the kidneys additionally process it,
so it doesn’t put a lot strain on the liver. Thus, we think about the chance of significant liver damage through this
cycle to be low. Thus, our patients utilize Nolvadex and Clomid after this stack to resurrect testosterone levels (without the addition of hCG).
Regardless of where you live, if top quality anabolics
are what you’re after and you want to keep inside the
security of the legislation, you would possibly be encouraged to look at
the sponsors right here at Steroid.com. You will find these sponsors carry high quality, high
shelf anabolics that might be purchased legally without a prescription and that current no concern as it pertains to a legal violation. Thus it’s pretty widespread for individuals to get scammed when attempting to purchase anavar.
As a outcome, the danger is even higher when making an attempt to acquire this steroid as dealers often cut the dose with out you understanding, or sell you fillers to extend their profit margins.
It is a synthetic derivative of dihydrotestosterone (DHT), an androgenic hormone.
Anavar is thought for its mild nature in comparability with other anabolic steroids,
making it a well-liked choice for athletes and bodybuilders, significantly women and people seeking a less potent steroid.
Anavar is considered one of many milder anabolic steroids,
nevertheless it still carries potential risks, together with liver pressure, ldl cholesterol points, and
hormone suppression. Proper dosage, cycle length, and post-cycle
remedy (PCT) are crucial for minimising unwanted effects.
When it involves Anavar dosage for athletes, it may be very
important consider the specific sport and the athlete’s goals.
In medical research, the one incidence of gynecomastia
occurring from oxandrolone was in a research conducted on adolescent
boys (12). 33 instances of gynecomastia have been reported; however, these findings are contradictory to different analysis in adults.
Thus, the danger of gynecomastia seems to considerably increase if kids utilize Anavar for extreme durations
during puberty. These youngsters had been taking reasonable
doses of Anavar constantly for six months to eight years.
In our expertise, ladies can usually experience superior
results in muscle mass compared to men on Anavar,
even with a modest dose of 5–10 mg per day.
We discover that when bodybuilders administer Anavar,
they usually expertise an increase in well-being, confidence, motivation, and aggression. This is due
to exogenous testosterone supplementation; nevertheless,
as quickly as a cycle finishes, customers usually
expertise fatigue and lowered libido. In the previously cited examine,
the researchers measured the impact of oxandrolone on endogenous testosterone levels.
After 12 weeks, the teams taking 20 mg and 40 mg per day skilled a 45% reduction in testosterone.
Anavar causes significant intracellular water retention, leading to continuously full and pumped
muscles all through the day.
Insulin resistance and diminished glucose tolerance in powerlifters ingesting anabolic steroids.
(2) Schimrigk, Häusler, G., Blümel, P., Plöchl,
E., Waldhör, T., & Frisch, H. Calorie intake ought to
be tailor-made to a user’s objectives when biking Anavar.
Subsequently, if Anavar is taken with the intention of bulking and gaining lean mass,
then a small calorie surplus may be adopted to reinforce muscle and power results.
We find injectable trenbolone poses little danger to
the liver in moderate doses, with it quickly getting into the bloodstream as a
substitute of passing via the liver. However, methyltrienolone, or oral trenbolone, is severely hepatotoxic and consequently is now not
utilized in drugs, with research deeming its toxicity unacceptable (31).
We find Anavar peaks fast within the bloodstream as a result of its quick half-life of
9–10 hours.
References:
best place to buy anabolic steroids online – Carole,
Anavar will help maintain your efficiency and power capacity even on the most
limited of calorie-deficit diets. Critically, your results are going to incorporate the preservation of your current lean muscle.
Anavar helps prevent you from changing into catabolic – where lean muscle is misplaced
as power. This does imply you’re using Anavar primarily as a pre-workout steroid.
Cholesterol levels are prone to return to normal as quickly as users
discontinue supplementation. Anavar causes important intracellular water retention,
resulting in continually full and pumped muscles all
through the day. Such muscle fullness, combined with Anavar’s diuretic properties, may end up
in more distinguished vascularity. Due to Anavar’s delicate androgenic ranking, it
does not typically produce virilization unwanted aspect
effects in women when taken in low to reasonable doses.
Anavar is a C17-alpha-alkylated oral steroid, meaning the compound might be fully active after bypassing the liver.
Nonetheless, unlike different oral steroids, Anavar isn’t significantly hepatotoxic.
This is as a outcome of the kidneys, and never the liver, are primarily responsible for metabolizing Anavar.
This is a constructive for bodybuilders, as they want
to preserve adequate DHT ranges, with the hormone binding to androgen receptors up to
5 occasions extra effectively than testosterone. Anavar has proven profitable in treating burn patients
because of its capability to accelerate restoration. Enhanced recovery enables an athlete to extend training depth, period, and frequency
for enhanced efficiency.
Furthermore, Anavar is often utilized in bridging phases
between cycles to help preserve gains and facilitate restoration. Anavar,
also called Oxandrolone, is an anabolic steroid that has gained significant recognition on the planet of health and bodybuilding.
It provides a range of advantages and is commonly utilized by athletes and bodybuilders to reinforce their performance and
physique. In this text, we are going to discover the necessary thing advantages of this steroid and talk about its common usage in the health community.
One of the primary advantages of Oxandrolone is its capability to advertise lean muscle
mass gains. It works by growing protein synthesis, which
finally ends up in the event of high quality muscle tissue.
At ENORME, we perceive that customers desire a trusted and verified product, which is why we offer Anavar
Biosira, a extremely regarded version of Anavar Oxandrolona
identified for its purity and constant results.
Athletes can feel assured of their buy, whether they’re trying to purchase Anavar
or purchase Oxandrolona Portugal. Obtain quick results, explore Anavar cycles, and see
beautiful earlier than and after transformations.
To ensure the authenticity of the Anavar you purchase in Mexico,
it could be very important buy from a reputable and licensed pharmacy or on-line retailer.
You can also check the packaging and labeling for any inconsistencies
or signs of tampering. In Mexico, Anavar is classified
as a managed substance and is listed within the Schedule
III class of the Basic Health Law. This signifies that possession, distribution, and sale of Anavar
and not utilizing a legitimate prescription from a licensed doctor is illegal and might lead to severe legal consequences.
Testicular atrophy is a common signal of decreased testosterone
ranges and impaired spermatogenesis. We have seen Anavar negatively have an result on fertility due to compromised HPT axis perform.
Nevertheless, sperm quantity and high quality usually enhance post-cycle over a number of weeks or months.
We discover that when bodybuilders administer Anavar,
they sometimes expertise an increase in well-being, confidence,
motivation, and aggression. This is because of exogenous testosterone supplementation; however, as soon as a cycle finishes, users often experience fatigue and reduced libido.
Additional research reveals that even tiny doses of oxandrolone (2.5 mg), when taken in boys suffering
from delayed puberty, can notably decrease endogenous testosterone production (17).
In my experience, that is the best way to make use of Anavar as a end result of we don’t need (or even want) to maintain consistent
ranges of this liver-toxic steroid (no matter how mild) 24 hours a day.
Females operating a first Anavar cycle ought to begin very low to judge
unwanted side effects. 5mg per day is known to be properly tolerated in scientific use by many female patients.
If a lady tolerates this dose well, the next step is 10mg;
many will discover 10mg every day to be the
perfect stability.
One factor that most individuals aren’t conscious of is Anavar’s astonishing
capability to stimulate creatine phosphate synthesis within the muscle cell.
When this occurs your body begins cranking out tons of ATP (adenosine tri-phosphate) the actual chemical you want for muscular power and ATP is vital!
And it’s most important for a bodybuilder, as a result
of low ATP levels which at all times happen after a exercise, dramatically limit
protein synthesis.
Nevertheless, if a consumer stacks Anavar with other anabolic steroids,
this suppressing effect shall be exacerbated. Alternatively, if a person doesn’t want to attend several months, they’ll incorporate post-cycle therapy to cut back this
recovery time period. Finasteride (Propecia) is
an FDA-approved medicine proven to be efficient at blocking DHT levels in the body
and reducing hair loss (19). Nevertheless, research show that roughly 52% of men report muscle loss
when taking it (20). We have also observed decreased muscle
hypertrophy in patients utilizing Finasteride.
Thus, taking this medication may counteract the anabolic effects of Anavar, inflicting bodybuilders to be unhappy with their outcomes.
Moreover, the price of Anavar may be very high, resulting in fraudulent sellers lowering the amount of oxandrolone or eradicating it entirely in change for a cheaper
substance. If a person is stacking Anavar with harsh compounds,
they may incorporate the above protocol. Nevertheless,
if a person makes use of an Anavar-only cycle, taking
considered one of these PCT medicine alone is prone to
be greater than enough in restoring endogenous testosterone production promptly.
People that purchase underground lab Anavar via the black
market might declare doses of 15–25 mg per day are modest.
This is because of copious scams where the label states forty mg of Anavar, but in reality, it’s only 20 mg.
This is a typical state of affairs where the seller has minimize the dose in half.
Trenbolone is the most effective recomp steroid but in addition the harshest AAS we will use.
Solely run this cycle if you’ve used Tren before and understand how to handle its
side effects. Though it’s an injectable steroid, Tren is understood to be extra liver-toxic
than Anavar, so we hold this as a brief cycle.
This is a male-only stack due to Trenbolone being unsuitable for girls.
References:
is It illegal to Use steroids (http://dev.icrosswalk.ru:46300/beckypethebrid)
Pill info available. [url=https://edpillrx.top/#]https://edpillrx.top/#[/url] Patient medication resource. best male ed pills
маркетплейс аккаунтов соцсетей https://marketplace-akkauntov-top.ru/
гарантия при продаже аккаунтов купить аккаунт
магазин аккаунтов социальных сетей продажа аккаунтов
маркетплейс аккаунтов магазин аккаунтов социальных сетей
Profitable Account Sales Website for Selling Accounts
Website for Buying Accounts Account Selling Platform
Website for Selling Accounts Account market
Account Selling Service Account Trading Platform
Account trading platform Website for Selling Accounts
Sell Account Database of Accounts for Sale
website for buying accounts find accounts for sale
secure account purchasing platform ready-made accounts for sale
purchase ready-made accounts secure account sales
ready-made accounts for sale verified accounts for sale
sell pre-made account account buying platform
sell account website for selling accounts
account buying platform account exchange service
account selling service account selling platform
sell pre-made account gaming account marketplace
purchase ready-made accounts sell account
online account store profitable account sales
accounts for sale profitable account sales
buy account account selling service
sell account social-accounts-marketplace.org
account exchange guaranteed accounts
account store guaranteed accounts
account buying platform database of accounts for sale
sell accounts secure account sales
account acquisition account market
РедМетСплав предлагает широкий ассортимент высококачественных изделий из редких материалов. Не важно, какие объемы вам необходимы – от мелких партий до крупных поставок, мы обеспечиваем оперативное исполнение вашего заказа.
Каждая единица изделия подтверждена соответствующими документами, подтверждающими их происхождение. Опытная поддержка – наш стандарт – мы на связи, чтобы разрешать ваши вопросы а также находить ответы под требования вашего бизнеса.
Доверьте вашу потребность в редких металлах профессионалам РедМетСплав и убедитесь в множестве наших преимуществ
поставляемая продукция:
Пруток магниевый M10413 – UNS Проволока магниевая M10413 – UNS является идеальным решением для сварки Рё РґСЂСѓРіРёС… промышленных задач. РћРЅР° отличается высокой прочностью Рё стойкостью Рє РєРѕСЂСЂРѕР·РёРё, что делает ее незаменимой РІ различных отраслях, таких как авиация Рё автомобилестроение. Если РІС‹ ищете надежный материал для СЃРІРѕРёС… проектов, можете купить Проволока магниевая M10413 – UNS Сѓ нас РїРѕ выгодной цене. Применение этой проволоки обеспечит долговечность Рё качество ваших работ. РќРµ упустите возможность улучшить СЃРІРѕР№ производственный процесс СЃ помощью этого замечательного продукта.
marketplace for ready-made accounts online account store
account selling platform account trading platform
profitable account sales https://accounts-buy-now.org
website for buying accounts guaranteed accounts
sell account account market
website for buying accounts accounts-marketplace.xyz
ready-made accounts for sale https://social-accounts-marketplaces.live/
account sale https://accounts-marketplace.live
account market https://social-accounts-marketplace.xyz
accounts for sale accounts market
account sale https://social-accounts-marketplace.live/
account trading platform https://accounts-marketplace-best.pro/
магазин аккаунтов akkaunty-na-prodazhu.pro
биржа аккаунтов https://akkaunt-magazin.online
продать аккаунт https://kupit-akkaunt.online
buy fb account buy-adsaccounts.work
buy facebook old accounts cheap facebook account
buy facebook ads manager https://ad-account-buy.top/
buy a facebook ad account https://buy-ads-account.work
buy facebook ad account https://buy-ad-account.click
Might be off-topic, but big vibes inside
Just while streaming radio sets I ran into a site https://breaks.djgafur.site.
It’s a 24/7 radio streaming chaotic energy sets featuring DJ Gafur and guests from around the world.
No boring straight lines — pure vibe.
Also found [url=https://breaks.djgafur.site]DJ Gafur Breaks & Breakbit Radio[/url] — definitely check it out!
What’s your vibe on chaotic electronic styles?
buy old google ads account https://ads-account-for-sale.top
buy google ad threshold account https://ads-account-buy.work
google ads accounts for sale https://sell-ads-account.click
buy google ad threshold account https://buy-verified-ads-account.work/
buy facebook verified business manager https://buy-business-manager.org/
70918248
References:
None (Allsolution.Xyz)
70918248
References:
none
verified business manager for sale buy-verified-business-manager-account.org
buy facebook verified business account https://buy-verified-business-manager.org/
buy verified business manager business-manager-for-sale.org
facebook bm account buy https://verified-business-manager-for-sale.org/
buy verified business manager https://buy-business-manager-accounts.org/
buy tiktok ads https://buy-tiktok-ads-account.org
buy tiktok business account https://tiktok-ads-account-for-sale.org
tiktok ads agency account https://tiktok-agency-account-for-sale.org
buy tiktok ads https://buy-tiktok-ads-accounts.org
buy tiktok ads accounts https://buy-tiktok-business-account.org
tiktok ad accounts https://buy-tiktok-ads.org
https://copicsketch.ru/
Aviator’s fast pace keeps me on edge. Never a dull moment! aviator
Joguei com aposta minima no Fortune Tiger e ainda assim ganhei bem! fortune tiger aplicatio
I’m still figuring out how to play Aviator, but it’s so much fun. aviator
Fortune Tiger e viciante, nao consigo parar de jogar esse slot! fortune tiger
I play Aviator every weekend, and it never gets old. aviator game
[url=https://baunti-casino-apk.ru]baunti-casino-apk.ru[/url]
По ссылке ниже — полезный гайд по игре в казино baunti. Там разобраны основные стратегии, бонусы и советы для новичков. Рекомендую ознакомиться, если интересуетесь этой площадкой!
baunti-casino-apk.ru
Just tried Aviator for the first time and I’m already a fan! app aviator
O recurso de rodadas gratis no Fortune Tiger e o melhor! fortune tiger
The demo mode in Aviator saved me from losing big while I was learning. aviator game
айфон купить в спб [url=https://kupit-ajfon-cs13.ru/]айфон купить в спб[/url] .
I’m hooked on Aviator, it’s the best casino game I’ve played! aviator bet login
[url=https://cactus-casino-apk.ru]cactus-casino-apk.ru[/url]
Приветствую всех!
Наткнулся на интересную статью для любителей мобильного гемблинга. По ссылке можно узнать подробности о том, как скачать казино cactus на телефон.
В материале, похоже, рассматриваются разные платформы (Android, iOS?), способы установки, а также вопросы безопасности и выбора надежного казино.
cactus-casino-apk.ru
Que slot fantastico, o Fortune Tiger nunca me deixa na mao! fortune tiger aplicatio
Anyone else obsessed with the red runway in Aviator? It’s so cool! aviator bet login
fortunetiger
aviator
The real-time multiplier in Aviator keeps me glued to the screen! aviator bet login
fortunetiger
tigrinho
aviator game
fortunetiger
[url=https://medicationsmx.top/#]overseas pharmacies no rx[/url] Patient drug info. Patient medication facts. reputable online pharmacies no prescription requied
fortune tiger 1win
aviator game
fortune tiger demo
Усыпление и кремация кошек и собак в Санкт-Петербурге [url=https://veterinarnayaclinica.ru/]veterinarnayaclinica.ru[/url]
tigrinho
aviator game
fortune tiger 333bet
fortune tiger
fortune tiger 1win
fortune tiger 333bet app
fortune tiger
aviator
fortune tiger demo
fortune tiger 333bet
fortune tiger
aviator
fortune tiger
fortune tiger 333bet
fortune tiger
aviator
fortune tiger
fortune tiger
aviator
косметический ремонт
http://www.kalyamalya.ru/modules/newbb_plus/viewtopic.php?topic_id=23178&post_id=104461&order=0&viewmode=flat&pid=0&forum=4#104461
https://kam-podilsky.pp.ua/viewtopic.php?t=130
http://forum.toonboom.ru/index.php?/topic/5519-капитал-голд-скупка-золота-и-ювелирных-изделий/
Сделал заказ подписчиков ВК через популярный сервис — всё быстро, аккуратно и без подозрений. Уровень доверия к странице вырос. https://dtf.ru/pro-smm/3808309-kupit-podpischikov-vk-luchshie-sayty-2025
Сейчас без стартовой аудитории сложно раскрутиться. Покупка подписчиков помогла привлечь первых клиентов. https://dtf.ru/pro-smm/3808309-kupit-podpischikov-vk-luchshie-sayty-2025
Покупка подписчиков — это просто инструмент. Главное — использовать его с умом. https://dtf.ru/pro-smm/3808309-kupit-podpischikov-vk-luchshie-sayty-2025
Купил 1000 подписчиков, и теперь реклама даёт лучший отклик. https://dtf.ru/pro-smm/3808309-kupit-podpischikov-vk-luchshie-sayty-2025
драгон мани зеркало
https://x-ray.contact/identities/olaf-zander-email-and-phone/63fc45d9c45ae4c13f3e3076/
dragon money
Сотрудничество с компанией НАПЫЛЕНИЕ РФ, специализирующейся на поставке редкоземельных материалов для различных методов напыления, открывает перед вашим предприятием двери в мир высококлассных инноваций. Закупка у нас гарантирует не только доступ к премиальным продуктам, но и возможность заказа любого необходимого объема.
С широким ассортиментом продукции на основе редкоземельных материалов, от мышьяка до циркония, компания НАПЫЛЕНИЕ РФ готова удовлетворить потребности самых требовательных покупателей. Каждый продукт сопровождается всеми соответствующими документами, удостоверяющими его происхождение и соответствие всем нормам.
Кроме того, НАПЫЛЕНИЕ РФ понимает важность профессионального взаимодействия и поддержки на каждом этапе партнерских отношений. В нашем лице вы найдете не просто поставщика, но и партнера, готового предложить квалифицированную помощь и поддержку, опираться на ваши конкретные потребности и адаптировать условия поставки под особенности вашего производства.
Выбирая сотрудничество с НАПЫЛЕНИЕ РФ, вы гарантируете себе плавное и бесперебойное снабжение ценными напыляемыми материалами, позволяющее вам без остановки реализовывать самые передовые и технологичные проекты. Ваш бизнес получит крепкого союзника, с которым текущие трудности превращаются в завтрашние возможности.
Наши товары:
Мишень из ниобия для распыления
dragon money
dragon money официальный сайт
dragon money зеркало
https://proxyelite.info/how-do-i-hide-dns-in-proxifier/ Hiding DNS in Proxifier: Step-by-Step Guide
сопровождение сделок с недвижимостью спб
drugs buy https://www.google.co.th/url?q=https%3A%2F%2Fmedicationsmx.top rx pharmacy online online prescription pharmacy usa
https://punkgazetka.forum24.ru/?1-9-0-00003148-000-0-0-1746850752
Замок на офисе заклинило, служба помогла. Всё сделали профессионально!
вскрытие замков долгопрудный
Замок на двери заклинило ночью, приехали быстро. Всё сделали аккуратно, спасибо!
вскрытие замков в москве
Служба вскрытия замков спасла меня в выходной! Приехали быстро, всё открыли. вскрытие замков
Служба вскрытия замков работает 24/7, это реально удобно! Быстро и аккуратно.
вскрытие замков долгопрудный
драгон мани официальный сайт
In Nigeria, there is not only only intermediary available around the clock, but also a casino, the [url=https://femaleinvestorsmagazine.com/ultimate-guide-to-sports-betting-bonuses-unlocking/]https://femaleinvestorsmagazine.com/ultimate-guide-to-sports-betting-bonuses-unlocking/[/url], which of course is worth use.
куда обращаться по правам потребителей
70918248
References:
best steroid pills for bodybuilding (Df999.work)
70918248
References:
how to come off steroids [https://seeratsalman.Com/business-meeting-2023-in-san-francisco/]
Букет собрали именно так, как я просила – спасибо за внимание!
букет цветов томск
Букет собрали именно так, как я хотела!
заказать цветы с доставкой в томске
Стильная упаковка и свежие цветы!
заказ цветов томск с доставкой
70918248
References:
mike o’hearn steroids (olerni.az)
Огромный выбор – глаза разбегаются от красоты!
купить цветы томск
Быстрая доставка, отличное качество!
доставка цветов в томске
Даже лучше, чем на фото!
розы томск
Аромат просто божественный – наполняет весь дом!
букет невесты
https://shoplook.io/profile/vikontua
https://telegra.ph/Guide-to-Converting-NEF-to-RAW-and-Back-to-NEF-06-09
http://crystalroleplay.clanfm.ru/viewtopic.php?f=8&t=34421
https://telegra.ph/Best-Online-Converter-for-AVIF-to-JPG-Images-06-09
http://baikal-biz.ru/forum/viewtopic.php?f=15&t=103834
https://telegra.ph/Convert-JPG-to-WebP-for-Better-Website-Performance1-06-09
?? У кого в дипломе хоть раз была правда?
Серьезно: вы когда-нибудь смотрели свой диплом и думали — “да, всё, что здесь написано, я действительно знаю и умею”?
У многих — только сертификат. Корочка, глянцевая, с гербом и подписями, которую HR пролистывает за 1,5 секунды. А потом спрашивают: опыт, кейсы, компетенции, “что умеешь по факту?”. Диплом где-то там, в глубокой папке.
Но парадокс в том, что без диплома тебе даже не дадут шанс доказать, что ты умеешь.
Ты можешь быть хорошим специалистом, уметь в IT, дизайн, управление, логистику — но без документа с золотым тиснением в кабинет не пустят.
?? Нормально ли это? Нет. Реальность ли это? Да.
Вот потому и появляются услуги, которые дают предложение:
“Не хочешь тратить 5 лет ради корочки? Мы решим вопрос. Тебе нужен не вуз — тебе нужен диплом.”
Ты его получаешь, кладёшь в резюме, и дальше всё зависит от твоих мозгов, а не от шрифта на бумаге.
Кто-то скажет: “Это обман!”
А кто-то — “Это адаптация к системе, которая обманывает тебя с детства”.
?? И что в итоге?
Диплом становится не подтверждением знаний, а входным билетом. Как QR-код в метро — проверили, что есть, и пропустили.
Поэтому люди и принимают такие решения.
Не потому что глупые. А потому что взрослые, занятые, уставшие от лишнего.
Потому что хотят не учиться “ради процесса”, а работать по делу.
?? Ирония в том, что большинство таких дипломов — работают.
Даже если ты их не учил — ты знаешь, как применить. А вот “настоящие выпускники” потом всё равно идут на курсы и стажировки, потому что ничего не помнят.
И что важнее: корочка или то, как ты справляешься с задачей?
?? У кого были такие мысли — пишите. У кого был опыт — делитесь.
Кто заказывал диплом СЃ возможностью внесения РІ Р¤РРЎ ФРДО — это реально или маркетинг? [url=https://spbrcom.ru/]Ваш переход[/url]
https://telegra.ph/Optimize-Your-Workflow-with-JPG-to-JPEG-Conversion-06-09
70918248
References:
are steroids made from cholesterol (haval.pk)
capital one
перепланировка москва [url=http://canvas.instructure.com/eportfolios/3814924/domashniaia-stranitsa/chto-dielat-s-pierieplanirovkoi-poshaghovoie-rukovodstvo-po-soghlasovaniiu/]перепланировка москва[/url] .
berkeley dubai
ava dubai
binghatti ivory dubai
altitude dubai
avena the valley
electra apartments
70918248
References:
none (Thurman)
https://doubledragon.kontek.net/forums/viewtopic.php?t=18514
https://forum.helplamer.ru/viewtopic.php?pid=8710#p8710
оценка часов онлайн бесплатно [url=www.ocenka-chasov-onlajn2.ru]оценка часов онлайн бесплатно[/url] .
track casino
blaze casino
monticello casino
bbrbet casino
WB-Tech — эксперты в разработке ПО на заказ: создаём кастомные веб- и мобильные приложения с адаптивным интерфейсом. Автоматизируем HR-процессы через low-code-платформу, позволяя настраивать рекрутинг и онбординг. Кастомизируем Jira для оптимизации рабочих процессов и контроля выполнения задач. Автоматизируем финансовый учёт и отчётность, снижая затраты. Предоставляем IT-консалтинг, подбор специалистов и поддержку проектов под ключ и масштабируемые решения для роста вашего бизнеса.
Автоматизация бухгалтерии
WB-Tech — эксперты в разработке ПО на заказ: создаём кастомные веб- и мобильные приложения с адаптивным интерфейсом. Автоматизируем HR-процессы через low-code-платформу, позволяя настраивать рекрутинг и онбординг. Кастомизируем Jira для оптимизации рабочих процессов и контроля выполнения задач. Автоматизируем финансовый учёт и отчётность, снижая затраты. Предоставляем IT-консалтинг, подбор специалистов и поддержку проектов под ключ и масштабируемые решения для роста вашего бизнеса.
Заказная разработка для стартапов
WB-Tech — эксперты в разработке ПО на заказ: создаём кастомные веб- и мобильные приложения с адаптивным интерфейсом. Автоматизируем HR-процессы через low-code-платформу, позволяя настраивать рекрутинг и онбординг. Кастомизируем Jira для оптимизации рабочих процессов и контроля выполнения задач. Автоматизируем финансовый учёт и отчётность, снижая затраты. Предоставляем IT-консалтинг, подбор специалистов и поддержку проектов под ключ и масштабируемые решения для роста вашего бизнеса.
Автоматизация учета финансов
Its such as you learn my thoughts! You seem to understand so much approximately this, like you wrote the guide in it or something.
I think that you could do with some % to pressure the message
home a bit, however instead of that, this is excellent
blog. An excellent read. I will definitely be back.
WB-Tech – заказная разработка ПО: web и мобильные приложения, low-code автоматизация HR-процессов, кастомизация Jira, финансовая автоматизация и IT-сопровождение.
Разработка мобильных приложений на заказ
Букет как живой – просто чудо!
купить розы в томске
Заказала коллегам на 8 Марта – все остались в восторге!
доставка цветов томск
Красота нереальная – будто из сказки!
купить розы в томске
Нам важно, чтобы строительство соответствовало мировым стандартам. Компания обладает [url=http://certificates.chtonamstoit.site/]международными сертификатами качества[/url].
Огромное спасибо за быструю доставку и свежие цветы!
букеты томск
Доставили в офис – все завидовали!
заказать цветы с доставкой в томске
Свежесть и красота в каждом лепестке!
доставка цветов
Доставили в больницу – всё аккуратно и бережно.
розы томск
https://bryansktoday.ru/article/243776
https://rekforum.ru/viewtopic.php?p=167925
http://www.kalyamalya.ru/modules/newbb_plus/viewtopic.php?topic_id=19160&post_id=105621&order=0&viewmode=flat&pid=97255&forum=4
https://bioniclerpg.getbb.ru/viewtopic.php?f=6&t=6279
https://salda.ws/f/topic.php?f=5&t=94880
http://wisdomtarot.tforums.org/viewtopic.php?f=8&t=23430
Девушка была в экстазе – лучший подарок!
букет невесты
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
Цветы продержались больше недели – это рекорд!
доставка цветов томск
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
goobet
Ценю точность – привезли ровно в обещанное время!
заказ цветов томск с доставкой
goobet
goobet
Доставка цветов цена купить в Москве – прозрачные тарифы без сюрпризов. доставка цветов г москва
Заказывала тёте – она до сих пор радуется!
заказ цветов томск с доставкой
Уникальная композиция – такого точно ни у кого нет!
доставка цветов в томске
Цветы продержались больше недели – рекорд!
доставка цветов
Лучший подарок для самых дорогих!
розы томск
Огромный выбор для любого повода!
гипсофилы цена букета
Заказала в 9 утра – к 11 уже получила свежайшие цветы!
розы купить в томске
Заказала с доставкой на работу – все ахнули!
розы купить в томске
Розы шикарные, крупные бутоны, доставили аккуратно.
купить цветы томск
Аромат божественный – наполняет весь дом!
101 роза
Повторили картинку из интернета один в один!
купить цветы в томске
https://www.floristic.ru/forum/groups/moskva-d1062-energeticheskii-napitok-eazy-energy.html#gmessage1578
https://gribisrael.borda.ru/?1-9-0-00001167-000-0-0-1748308501
https://silverstream.forum24.ru/?1-12-0-00005344-000-0-0-1748307878
Сложный заказ выполнили безупречно и быстро!
доставка цветов
https://gribisrael.borda.ru/?1-9-0-00001167-000-0-0-1748308501
Орхидеи свежие, крепкие – просто красота!
букет цветов томск
суши запеченные заказать в челябинске
rent a car
car rental
Заказать сушь
Мамин юбилей запомнится всем благодаря вам!
букет цветов томск
заказать суши запеченные роллы
Choose your location from the list below to discover trusted no-KYC casinos available in your region, complete with detailed reviews, withdrawal processes, and exclusive bonuses we’ve negotiated for our readers. Your path to hassle-free, private online gaming starts here.
Popular casinos without providing documents
Select your region below to find Bitcoin Casinos No Verification and Crypto Casinos No KYC available in your area. Get straight to the games without jumping through identity verification hoops.
Licensed casinos without verification
Спасли ситуацию – за час до свидания доставили букет!
доставка цветов томск на дом
Online na prawdziwe pieniadze to kasyno, ktore daje rade. Sloty i bonusy na plus!
https://vulkan-vegas-casino-poland.pro/
MEGA NAGRODY dla nowych graczy to prawdziwy hit. Dostalem 50 free spinow od razu!
Vulkan Vegas Kasyno
Whether you prefer cryptocurrency for complete anonymity or traditional payment methods with minimal verification, our country-specific guides will point you in the right direction.
Top online casinos without verification 2025
Cut the bullshit. We’re not here to waste your time with fancy promises and marketing talk. We’re here to connect you with legitimate No KYC Casinos that actually respect your privacy.
How to get winnings without verification at casino
Choose your location from the list below to discover trusted no-KYC casinos available in your region, complete with detailed reviews, withdrawal processes, and exclusive bonuses we’ve negotiated for our readers. Your path to hassle-free, private online gaming starts here.
Large sum withdrawal without identity verification at casino
here
Your Gateway to the Virtual Reality Business
Step into the future with cutting-edge VR solutions.
Whether you’re looking to open a VR arcade, launch an
immersive escape room, or create a virtual world like Sandbox
VR or Zero Latency, we provide the tools and expertise to make
it happen.
Why Choose Us?
— Proven expertise in VR technologies.
— End-to-end support: from concept to launch.
— Cost-effective investments with quick ROI.
Start your VR business today and be part of the next big
thing in entertainment and technology!
open virtual reality arena
https://olive-sretenka.ru/
лампы дешёвые
saif zone job vacancies
http://wmking.ru/t82780.html
лампа светодиодная купить
ramla restaurant saif zone
mini mart saif zone
ramla restaurant saif zone sharjah
saif zone bus service
https://wokerman.ru/
kra33 cc
kra33.at
готовность книжки в день обращения
http://www.hdkinoteatr.com/index.php?subaction=userinfo&user=erusopitu
удобная доставка медкнижки
USA SMS Bomber for hilarious pranks! Visit https://t.me/smsjokeservice and use @smsExplode_bot!
Flood SMS USA with hilarious texts using @smsExplode_bot! Join https://t.me/smsjokeservice for fun now!
Bomber SMS for epic pranks! Visit https://t.me/smsjokeservice and prank with @smsExplode_bot!
SMS Bomber USA is your go-to for pranks! Check out https://t.me/smsjokeservice and try @smsExplode_bot today!
SMS Bomber brings the prank vibes! Join https://t.me/smsjokeservice and try @smsExplode_bot today!
USA SMS Bomber for prank perfection! Visit https://t.me/smsjokeservice and use @smsExplode_bot!
Flood SMS USA with @smsExplode_bot for fun pranks! Check out https://t.me/smsjokeservice now!
Flood SMS USA with hilarious messages using @smsExplode_bot! Check out https://t.me/smsjokeservice for the ultimate prank tool!
Flood SMS with @smsExplode_bot for endless laughs! Discover more at https://t.me/smsjokeservice today!
Flood SMS with @smsExplode_bot for non-stop fun! Visit https://t.me/smsjokeservice to join the prank party!
оформление медкнижки
blacksprut зеркало
blacksprut зеркала
медицинская справка для учебного заведения
блэкспрут зеркало
https://issuu.com/inlex_partners
анализы для медицинской книжки
blacksprut onion
blacksprut ссылка
читать
https://www.reverbnation.com/inllex/press
как зайти на blacksprut
анализы для медицинской книжки
блэкспрут ссылка
blacksprut зеркало
https://www.behance.net/inlexpartners/
https://www.wantedly.com/id/inlex_partners
uae free zones visa.pdf
https://500px.com/p/inlex_partners
quality assurance in the free zones of dubai
list of free zones in ajman
https://www.minds.com/inlex/about
how many free zones are there in oman
free zones captions
https://www.reverbnation.com/artist/inllex
Сайт Diagnoz-Med — это быстрый способ оформить медсправку в Москве. Все справки выдаются с печатями и регистрацией в журнале.
На Diagnoz-Med можно заказать медкнижку, справку в бассейн или для ГИБДД без потери времени. Услуги доступны в будни и выходные.
Если срочно нужна официальная справка от врача, Diagnoz-Med поможет всё оформить законно и быстро. Доставка по Москве включена в стоимость. https://diagnoz-med.ru/
Оформление медицинской книжки стало проще — сервис Medic-DPO позволяет получить все документы за один день. Услуга доступна без очередей и с возможностью доставки.
Medic-DPO предлагает легальное и быстрое оформление санитарной книжки с прохождением всех врачей. Все документы соответствуют санитарным нормам и стандартам.
Нужно пройти медосмотр для устройства на работу? На Medic-DPO вы можете записаться онлайн и получить результат в кратчайшие сроки. https://medic-dpo.ru/
Kristall-Med предоставляет услуги по оформлению медицинских справок и больничных листов с доставкой. Услуги доступны по всей Москве и Московской области.
На Kristall-Med можно заказать справки в школу, садик, для бассейна и спорта. Всё оформляется по стандартам медицинских учреждений.
Удобный способ получить меддокументы — обратиться в Kristall-Med. Онлайн-заявка занимает всего 5 минут, а доставка работает ежедневно. https://kristall-med.ru/
spicy bite saif zone contact number
ramla saif zone
Просто восторг и ничего больше! Спасибо!
101 роза
indian house restaurant saif zone sharjah
saif zone license renewal
www saif zone com
Аромат просто божественный!
заказ цветов томск
Директор оценила мой вкус – спасибо за помощь!
гипсофилы цена букета
15 seater mercedes benz sprinter rental
https://bestforum.forum-top.ru/viewtopic.php?id=2846#p5429
http://wmking.ru/t82820.html
rent Rolls Royce dubai
https://silverstream.forum24.ru/?1-12-0-00005399-000-0-0-1748601887
iflow hikvision [url=http://citadel-trade.ru/]http://citadel-trade.ru/[/url] .
https://forum.prosochi.ru/topic49829.html
автоматические рулонные шторы на створку [url=http://www.elektricheskie-rulonnye-shtory77.ru]http://www.elektricheskie-rulonnye-shtory77.ru[/url] .
Пробились через пробки и доставили вовремя – герои!
купить цветы томск
Как в сказке – такие красивые цветы!
гипсофилы цена букета
Прорвались через пробки и доставили вовремя – герои!
купить цветы томск
ресторан-шаляпин.рф
https://omsi2mod.ru/forum/12-5532-1
https://ds418.ru/
ds418.ru
lovimani.ru
https://ресторан-шаляпин.рф/
http://wisdomtarot.tforums.org/viewtopic.php?f=8&t=24249
https://lovimani.ru/
Доставили рано утром – сделали потрясающий сюрприз!
розы томск
lucky jet
https://sexcloud.ru/umerla-kajli-pejdzh/
http://m2motors.com.ua/index.php?subaction=userinfo&user=ulikysi
лаки джет
Доставили несмотря на ливень!
101 роза
mostbet bonus şərtləri [url=https://mostbet4045.ru/]https://mostbet4045.ru/[/url]
888starz вход [url=http://www.https://22bet.zone]888starz вход[/url] .
Повторили картинку из интернета идеально!
купить пионы томск
Consultants help businesses in Dubai secure government approvals
quickly.
far consulting business setup and pro services
Free zone businesses business setup in saudi arabia Dubai enjoy customs duty exemptions.
Шеф оценила мой вкус – спасибо за помощь в выборе!
заказать цветы с доставкой в томске
кракен тор
Тюльпаны нежные, будто только что срезали!
доставка цветов в томске
кракен онлайн
Все коллеги завидовали – такой красоты у них не было!
купить розы в томске
kraken vk3
кашпо напольное для сада [url=http://kashpo-napolnoe-spb.ru/]http://kashpo-napolnoe-spb.ru/[/url] .
kraken РФ
Great facts, Thanks.
https://ajuda.cyber8.com.br/index.php/Separator_39Z
кракен vk4
Первый раз заказала – и сразу стала постоянной клиенткой!
доставка цветов томск на дом
kraken vk4
драгон мани зеркало
Букет превзошел все ожидания!
доставка цветов в томске
драгон мани зеркало
kraken ссылка
селектор казино
selector casino промокод
selector casino
kraken darknet market
Консультант подобрал идеальный вариант за минуту – профессионал!
доставка цветов томск
1xwin официальный сайт [url=http://1win1138.ru/]http://1win1138.ru/[/url]
kraken ios
care about people around you [url=http://care-people-help.org/]care about people around you[/url] .
kraken
Топливозаправщик купить
Автоцистерны АЦН купить
car repair service
http://justforum.bestforums.org/viewtopic.php?f=29&t=10461
car repair service
car repair service
kraken marketplace
уничтожение клопов
Вежливое обслуживание – это приятно!
купить цветы томск
kraken android
can i get cheap bactrim prices
https://sencampus.com
кракен обмен
Medicine information leaflet. Brand names.
can you get aricept without a prescription
Some trends of medicament. Get information now.
kraken СПб
comment obtenir des comprimГ©s d’coversyl gГ©nГ©rique
kraken РФ
Medicament information sheet. Drug Class.
where can i get cheap zithromax without insurance
Best news about medicines. Get information here.
can i order calan pills
kraken ios
ванная гидромассажная купить [url=www.hidromassazhnaya-vanna.ru/]ванная гидромассажная купить[/url] .
kraken qr code
1win token to usd [url=https://www.1win3025.com]https://www.1win3025.com[/url]
высокое кашпо для цветов напольное из пластика [url=www.kashpo-napolnoe-rnd.ru/]высокое кашпо для цветов напольное из пластика[/url] .
kraken vk3
where can i get lasix without insurance
kraken vk5
vegastars login
кашпо напольное высокое пластик [url=https://kashpo-napolnoe-rnd.ru]кашпо напольное высокое пластик[/url] .
kraken client
Medication prescribing information. Generic Name.
where can i buy generic esomeprazole tablets
Actual news about drug. Read now.
https://forum.prosochi.ru/topic49960.html
mostbet pul çıxarma [url=http://mostbet4048.ru/]http://mostbet4048.ru/[/url]
https://1abakan.ru/forum/showthread-367836/
how can i get theo 24 cr without insurance
kra34.cc
kra34 cc
kra34 cc
kra34.cc
kra34 cc
bs2best.at
Medicine information leaflet. What side effects?
combining tylenol 3 and diclofenac safe or risky
All about medicines. Read now.
can i buy cheap fml forte without dr prescription
kra34.at
bs2best.at
kra34at
кракен ссылка
Thanks for the article. Here’s more on the topic https://stalker-land.ru/
кракен vpn
quel est le prix de l’zoloft
кракен ios
dragon money официальный сайт
кракен android
Meds information. What side effects?
can you buy keflex no prescription
Everything news about medicament. Get here.
kraken onion
ГЁ possibile acquistare cephalexin senza ricetta medica
kraken onion
where can i buy generic cetirizine price
[url=https://onlinepharmeasy.top/#]trusted online pharmacy[/url] online pharmacy no prescription pharmacy online online pharmacy hydrocodone
Pills information. What side effects?
lisinop hydrochlorothiazide
Some information about meds. Read here.
kraken vk2
can i purchase generic etodolac tablets
online pharmacy review https://onlinepharmeasy.top/# xanax online pharmacy online pharmacy review
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 2394 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://poligraf21.ru/]Как купить диплом о высшем образовании[/url] — ответим быстро, без лишних формальностей.
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 1821 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://uadiplom11.ru/]Можно ли купить диплом о высшем образовании[/url] — ответим быстро, без лишних формальностей.
кракен зеркало
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 2633 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://uadiplom13.ru/]Купить диплом института образования[/url] — ответим быстро, без лишних формальностей.
кракен Москва
Ваши цветы – лучший подарок!
цветы томск
Быстро оформили заказ, даже ночью!
заказ цветов томск
Drug information for patients. Drug Class.
can you get neurontin prices
Some trends of drugs. Read information now.
Просто огонь – такой красоты я еще не видела!
купить цветы томск
кракен vk3
1win token listing date [url=http://1win3024.com/]http://1win3024.com/[/url]
кракен клиент
can i purchase generic shallaki without insurance
[url=https://onlinepharmeasy.top/#]trusted online pharmacy[/url] pharmacy online legit online pharmacy reputable online pharmacy
кракен ios
Vavada Casino — популярная платформа для азартных игр с быстрой регистрацией и щедрыми бонусами. На вавада казино онлайн вы найдете лицензионные слоты, live , турниры с высокими шансами на выигрыш. Начните играть прямо сейчас!
https://vavada-casino17.ru/
Drugs information. Effects of Drug Abuse.
can i get cheap warfarin online
Best trends of meds. Read information here.
can prednisone cause menstrual bleeding
mexica online pharmacy https://onlinepharmeasy.top/# legit online pharmacy online pharmacy tech programs
kraken darknet
купить айфон спб [url=https://kupit-ajfon-cs3.ru]https://kupit-ajfon-cs3.ru[/url] .
how can i get cheap maxolon without a prescription
Medicine information for patients. Brand names.
lisinopril 20 mg w 941
Best about medication. Get information now.
кракен маркет
buy lyrica without rx
kraken darknet market
Drugs prescribing information. Brand names.
buying cheap synthroid without dr prescription
Everything about medicine. Get information now.
kraken vk4
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 3891 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://uadiplom10.ru/]Купить диплом университета[/url] — ответим быстро, без лишних формальностей.
mostbet qanunidirmi [url=http://mostbet4054.ru]mostbet qanunidirmi[/url]
posso ordinare effexor economico a prezzo
kraken darknet
dragon money официальный сайт
dragon money
comment obtenir de l’celexa sans prescription d’un mГ©decin
Medicines information. Long-Term Effects.
get actos price
Best news about medicines. Get now.
kraken vk3
where buy cheap co-amoxiclav without dr prescription
kraken market
Medicament prescribing information. Generic Name.
where to get cheap chlorpromazine tablets
Some news about medicine. Read now.
кракен актуальная ссылка
how to get generic accupril price
кракен Россия
buy actos 45 mg
kraken онлайн
Medication information. Short-Term Effects.
buying generic neurontin without rx
Everything trends of pills. Read information here.
кракен актуальная ссылка
can you buy generic lyrica without rx
kraken vk2
Medication information leaflet. What side effects can this medication cause?
where buy cheap lansoprazole without dr prescription
Actual news about medicine. Read information now.
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 1842 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://poligraf17.ru/]Пишите нам[/url] — ответим быстро, без лишних формальностей.
kraken vk2
Ламинат 32 класса в Экспострой. [url=www.xn--1-7sba5anhi5b.xn--p1ai]www.xn--1-7sba5anhi5b.xn--p1ai[/url] .
izzi казино
иззи казино
sex
Карты Easypayments – ваш выбор для работы
в интернете. Оформите сегодня!
http://alchemie-des-seins.com/index.php?title=Benutzer:AletheaPulsford
Оплата с помощью карты от
Easypayments – это надежно. Оформите карту!
https://wiki.vwsl.me/index.php/Otkryt_Kartu_64D
https://mytopboard.ru/LB/KAT4/204.php
http://prospektdigital.ru/
seroquel a basso costo senza ricetta
Карты Easypayments – идеальное решение для онлайн-работы.
Закажите сейчас!
https://noakhalipedia.com/index.php/User:TysonSharland3
Зарубежные карты от Easypayments – ваш шанс на успех.
Закажите сегодня!
https://caersidiwiki.com:443/index.php/User:EvonneCalwell
Pills information sheet. Cautions.
get motrin price
Everything trends of medicines. Get here.
Быстро, красиво, надежно – три кита вашего сервиса!
купить цветы томск
Прекрасный букет, доставили вовремя! Мама была в восторге!
букет невесты томск
Муж был тронут подарком на годовщину.
заказать цветы с доставкой в томске
where buy depakote pills
buying facebook accounts guaranteed accounts account trading platform
Заказ обработали моментально – скорость впечатляет!
цветы
Medicine information leaflet. Drug Class.
metoprolol side effects breathing
All news about drugs. Read information here.
buying seroquel pill
prednisone breastfeeding baby side effects
Medicines information. What side effects can this medication cause?
where to get generic lopressor prices
All what you want to know about drug. Read information now.
Свежесть – будто только что сорвали!
розы томск
Букет стоит уже 10 дней и выглядит как новый!
доставка цветов
Цветы – как с картинки, даже лучше!
розы томск
Мгновенная доставка – это круто!
купить пионы томск
Спасибо за безупречный сервис и потрясающие цветы!
заказать цветы томск
купить диплом юриста [url=www.arus-diplom8.ru/]купить диплом юриста[/url] .
where to buy generic theo 24 cr without insurance
Drug information for patients. Cautions.
interactions between depakote and seroquel
Best information about drugs. Get information here.
Вот отличный материал, который проливает свет на ситуацию:
Кстати, если вас интересует lingomap.ru, посмотрите сюда.
Вот, можете почитать:
[url=https://lingomap.ru]https://lingomap.ru[/url]
Надеюсь, эта информация сэкономит вам время.
how to buy generic minipress online
Medication information for patients. Cautions.
where can i get cheap nolvadex tablets
Some what you want to know about medicament. Get information now.
ashwagandha seeds for farming
facebook accounts to buy account trading platform account purchase
cordarone infusion rate
Data-Leaks – Find what google can’t find
Great in data leak: With over 20 billion collected passwords
Super fast search speed: Allows easy and super fast search of any user or domain.
Many options for buy, many discout. Just 2$ to experience all functions, Allows downloading clean data from your query.
Go to : https://Data-Leaks.org
Get your story published with confidence. Use [url=https://www.zxcprint.com/products/book-printing/]zxcprint.com[/url] for custom book printing at affordable rates.
Medication information sheet. What side effects can this medication cause?
cost of generic pulmicort without prescription
Everything trends of drugs. Get here.
sex
buy generic bactrim without a prescription
amoxicillin and coke pampalaglag
Medicament information. Long-Term Effects.
gabapentin safe dose
Some about medicine. Read information now.
can i buy cheap clomid without insurance
Drugs information for patients. Generic Name.
order cheap fosamax without a prescription
All what you want to know about medication. Read information now.
buy prednisone 40mg generic propredonline
sex
Быстровозводимые магазины
драгон мани официальный сайт
Быстровозводимые магазины
Быстровозводимые ангары
автоматизация подбора персонала программы
Pills information for patients. Long-Term Effects.
alternatives to hydrochlorothiazide
All trends of drugs. Read now.
how can i get nootropil pills
автоматизация поиска персонала
силовой тмг [url=https://turforum.borda.ru/?1-8-0-00003247-000-0-0-1752135483/]силовой тмг[/url] .
can i get cheap zebeta pills
Психолог онлайн: ваш ключ к эмоциональному благополучию
В современном мире, где ритм жизни становится все быстрее, многие из нас сталкиваются с эмоциональными трудностями: стрессом, тревогой, неуверенностью или проблемами в отношениях. К счастью, сегодня доступна профессиональная помощь в удобном формате — психолог онлайн. Это не просто тренд, а реальный способ заботиться о своем душевном здоровье без лишних усилий.
### Почему стоит выбрать психолога онлайн?
Онлайн-консультации с психологом открывают новые возможности для тех, кто ценит свое время и комфорт. Вам не нужно тратить часы на дорогу или подстраиваться под график оффлайн-приема. С помощью интернета вы можете получить поддержку в любое удобное время, находясь дома или даже в командировке. Конфиденциальность и безопасность гарантированы — все сессии проходят в защищенном формате.
Еще одно преимущество — доступ к высококлассным специалистам. Онлайн-https://vk.com/club211532114и часто имеют опыт работы с клиентами из разных уголков мира, что обогащает их подход. Вы сможете найти специалиста, который идеально подходит именно вам, независимо от вашего местоположения.
### Как работает онлайн-психология?
Процесс прост и интуитивно понятен. После записи на консультацию вы связываетесь с психологом через видеосвязь, телефон или чат. Сеанс длится обычно 50-60 минут, в течение которых вы обсуждаете свои проблемы, получаете поддержку и вырабатываете стратегии для улучшения жизни. Психолог онлайн помогает справиться с депрессией, тревожными состояниями, улучшить самооценку и наладить отношения.
### Преимущества работы с онлайн-психологом
1. **Гибкость**. Сеансы можно проводить в удобное для вас время, даже ночью, если это необходимо.
2. **Экономия времени**. Забудьте о пробках и долгих поездках — помощь всегда под рукой.
3. **Индивидуальный подход**. Каждый клиент получает персонализированную стратегию работы над собой.
4. **Анонимность**. Вы можете быть уверены, что ваши данные останутся конфиденциальными.
### Как начать?
Первый шаг — это записаться на пробную консультацию. Это отличный способ познакомиться с психологом и понять, подходит ли вам его стиль работы. Большинство специалистов предлагают бесплатные или недорогие вводные сессии. После этого вы можете выбрать удобный график и формат общения.
Психолог онлайн — это ваш шанс взять контроль над своей жизнью и вернуть гармонию. Не откладывайте заботу о себе на потом — начните уже сегодня. Запишитесь на консультацию и убедитесь, как легко можно справиться с любыми вызовами вместе с профессионалом. Ваше эмоциональное здоровье заслуживает внимания, и онлайн-психология — идеальный инструмент для этого!
Онлайн-психолог — решение для занятых людей. Детский психолог онлайн проведет сеанс в игровой форме. онлайн сервисы психологов
Стильная упаковка и свежие цветы!
доставка цветов
Психолог онлайн решит ваши душевные проблемы. Детский психолог онлайн поможет с детской неуверенностью. детский онлайн психолог консультация стоимость
cost of generic mentax pill
Онлайн-консультация с психологом — это просто и удобно. Детский психолог онлайн справится с детской гиперактивностью. услуги психолога онлайн
автоматизация в hr
thmyl 1xbet balrbya [url=https://arabic1xbet.com/]thmyl 1xbet balrbya[/url] .
автоматизация подбора персонала программы
Онлайн-консультации с психологом — это удобно. Детский психолог онлайн поддержит в школьной жизни. семейный психолог онлайн консультация
Цветы будто только что с клумбы!
букет цветов томск
Онлайн-психолог всегда рядом, даже дома. Детский психолог онлайн поможет ребенку преодолеть страхи.
онлайн консультирование психолога
buy cheap buspar prices
С психологом онлайн вы станете сильнее. Детский психолог онлайн поможет с детской неуверенностью.
общение психолога анонимно онлайн
Мамин юбилей прошел на ура благодаря вам!
купить розы в томске
автоматизация найма
Meds information sheet. Long-Term Effects.
where buy neurontin without insurance
Everything news about drugs. Get information here.
системы автоматизации найма и подбора персонала
can i order cheap tetracycline without dr prescription
анализ резюме с помощью ии
Игровые автоматы с быстрым выводом
дома из бруса с мансардой
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 2300 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://diplomygoznak4.ru/]Узнать подробнее[/url] — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 2638 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://diplomygoznak3.ru/]Звоните[/url] — ответим быстро, без лишних формальностей.
1win ruletka [url=https://www.1win3043.com]1win ruletka[/url]
https://sberpaycasino.ru/
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 3139 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://diplomykupit5.ru/]На этой странице[/url] — ответим быстро, без лишних формальностей.
[url=byfurniture.ry]Дизайнерская мебель премиум класса[/url] — это воплощение изысканного стиля и безукоризненного качества.
Элитная мебель от дизайнеров — это не просто предметы интерьера, а настоящие произведения искусства. Мебель данного класса обладает исключительной функциональностью и эстетикой. Все больше людей выбирают мебель премиум класса для своих домов.
фахверковые дома цена под ключ
Hello! [url=https://pampharma.top/#online-pharmacy-technician-school]online pharmacy[/url] great site.
протезирование зубов Волгоград
Drugs information leaflet. Cautions.
how to get cheap paxil pill
Actual about medication. Read here.
cost cheap differin for sale
ключевые слова
протезирование зубов
ключевые слова
ключевые слова
can i get generic abilify prices
Meds information sheet. What side effects can this medication cause?
cost cheap tamoxifen pill
Some information about medicament. Get here.
Спасибо за свежесть и красоту!
букеты томск
can i purchase cheap amoxil tablets
Розы с доставкой в ресторан – создали идеальную атмосферу!
белые розы купить томск
Букет с живыми бабочками – волшебство!
доставка цветов в томске
Medicament prescribing information. Long-Term Effects.
finasteride farmaceutisch kompas
Actual information about meds. Get now.
Might be off-topic, but fits the heritage vibe here
Recently I checked out a site https://ukraine.tripland.info/
It’s all about Ukraine — from food to literature, folk traditions to nature trips. They cover architecture, athletes, rituals, festivals, and even legends.
Topics that stood out:
– The Klitschko brothers, Bublka, and world champions
Also found [url=https://ukraine.tripland.info/]an inspiring Ukrainian travel and culture guide[/url] — definitely worth exploring!
Love national culture content?
трехфазный трансформатор масляный купить [url=maslyanie-transformatory-kupit.ru]maslyanie-transformatory-kupit.ru[/url] .
can i purchase ashwagandha online
сколько стоит аппарат узи новый [url=http://www.kupit-uzi-apparat15.ru]http://www.kupit-uzi-apparat15.ru[/url] .
Hello! [url=https://buyedpills.shop/#reputable-canadian-online-pharmacy]buy ed drugs no prescription[/url] beneficial web site.
Слоты с джекпотами — это адреналин, стоит попробовать!
https://bonusrot.com/index.php/Sever-bonus_8L
Проверял демо-версии, можно потестить перед игрой на деньги.
https://wiki.mikui.net/wiki/Utilisateur:DamianUnj05
Казино Север реально держит марку, всё на уровне.
http://www.vloeimans.com/index.php?title=User:Deneen7789
https://beatstrokebook.com/
where can i get accutane without a prescription
Мини-розы в горшочке – мило и практично, продолжают радовать!
купить 101 розу в томске
Hello, gambling enthusiasts!
While playing online casinos, I realized that the key to successful gaming is the right strategies.
Guides that became important to me:
https://www.velbehag.org/2025/06/19/page-832/
These analytical reviews helped me minimize risks. They covered topics like slot RTP, which allowed me to understand how the system works. If you also want to play more mindfully, I recommend exploring theoretical aspects. It’s your first step toward a winning strategy.
May luck be on your side!
Pills information. Drug Class.
can i get benicar
Actual what you want to know about drugs. Get now.
Букет для строгой директрисы – даже она улыбнулась!
доставка цветов в томске
лендинг купить цена
сайт-визитка цена
разработка интернет-магазина на 1с битрикс
продвижение сайтов в топ 10
how to get generic medex without prescription
создание интернет магазина на битрикс
https://www.smetdlysmet.ru/forum/viewtopic.php?p=31213
Транспортная компания сделала доставку https://pipewiki.org/wiki/index.php/Vtt-logistics_5J Китая в Москву за 5 дней!
Морские https://vandalismwiki.uk/wiki/%E5%88%A9%E7%94%A8%E8%80%85:KandiFalbo93 из Китая — надёжный способ доставки.
Medicine information. Short-Term Effects.
does gabapentin interact with ambien
Actual news about drug. Get information here.
[url=https://imitrex2rp.shop/#]sumatriptan[/url] imitrex2rp sumatriptan imitrex
get cheap zyrtec pill
Перевозка https://wiki.ragnarok-infinitezero.com.br/index.php?title=User:IAKJamal0160429 Китая в Москву — всё чётко, рекомендую.
Сборные грузы https://wiki.mikui.net/wiki/Utilisateur:Sheree36P22 Китая — отличный способ сэкономить.
Контейнерные перевозки https://srv482333.hstgr.cloud/index.php/User:LeifN2151722 Китая в Россию — надёжный партнёр.
https://sensaudio.ru/iz-kakogo-dereva-luchshe-stroit-banyu
Шедевр флористики!
доставка цветов в томске
where buy generic avalide pill
[url=https://imitrex2rp.shop/#]imitrex2rp[/url] sumatriptan imitrex2rp imitrex2rp
Pills information. What side effects?
cost of cheap xenical prices
Actual what you want to know about drugs. Read now.
usa sms bomber
Психолог онлайн поможет справиться с тревогой. Детский психолог онлайн проведет сеанс для всей семьи.
психолог для подростка калуга
https://ru.gorodwiki.ru/peterburg/izba-776157-otzyvy
Онлайн-консультация с психологом — это просто. Детский психолог онлайн поддержит в учебных трудностях.
психолог калуга взрослый цены отзывы
flood sms usa
[url=https://imitrex2rp.shop/#]sumatriptan[/url] sumatriptan imitrex2rp imitrex
buy tadacip online uk
Психолог онлайн поможет улучшить жизнь. Детский психолог онлайн разберется с детской стеснительностью.
психолог запись онлайн
Доставили через снегопад!
купить цветы в томске
usa sms bomber
Not exactly related, but awesome if you love cooking
Just during a scroll session I discovered a site https://kitchen.myusefulnotes.online/
It’s packed with content: unusual desserts. From bone broth to Japanese udon, wild honey to spice theory.
Some titles that stood out:
– Blue Moon ice cream for kids
Also found this [url=https://kitchen.myusefulnotes.online/]amazing food knowledge hub[/url] — worth a scroll!
Love finding smart kitchen tricks?
С психологом онлайн вы почувствуете уверенность. Детский психолог онлайн разберется с детской стеснительностью.
занятия с детским психологом онлайн
order cheap vasotec price
Психолог онлайн поможет наладить жизнь. Детский психолог онлайн поддержит в переходных этапах.
кризисный психолог онлайн
Medicines prescribing information. Drug Class.
where to get azathioprine
All about medication. Read here.
https://sensaudio.ru/iz-kakogo-dereva-luchshe-stroit-banyu
Казино Spinbetter – это уникальная платформа для азартных игр, которая завоевала доверие пользователей благодаря своему профессионализму и множеству возможностей для развлечения. Открытое в 2020 году, это заведение быстро стало популярным среди игроков благодаря богатому выбору игр, щедрой бонусной программе и высококачественному обслуживанию.
Одним из главных преимуществ Spinbetter является разнообразие игровых автоматов. Здесь представлено более 8000 различных тайтлов от известных разработчиков, что позволяет каждому игроку найти что-то по своему вкусу. От классических слотов до современных видеоигр – тут есть всё для увлекательного досуга.
Не менее привлекательной является бонусная программа казино. Новички могут рассчитывать на впечатляющий приветственный бонус, который включает до 100% на первый депозит и множество бесплатных вращений. Регулярные игроки также не останутся без внимания: казино предлагает различные промоакции, кэшбэк и уникальные турниры, что делает игру ещё более увлекательной.
Казино Spinbetter имеет лицензию, что гарантирует безопасность ваших финансовых операций и честность игр. Платформа предлагает множество валют и методов для пополнения счета, включая криптовалюты, что делает её доступной для игроков со всего мира.
Для удобства пользователей разработано мобильное приложение, позволяющее наслаждаться азартными играми в любое время и в любом месте. Интерфейс удобен и интуитивно понятен, что особенно важно для тех, кто только начинает свой путь в мире онлайн-гемблинга.
Служба поддержки Spinbetter работает круглосуточно, предоставляя помощь в любое время. Игроки могут связаться с консультантами через живой чат или по электронной почте, получая оперативные и компетентные ответы на все свои вопросы.
К казино Spinbetter относят положительные отзывы как новых, так и постоянных игроков, что свидетельствует о высоком качестве услуг и надежности заведения. Если вы ищете местечко для азартных развлечений с высоким уровнем сервиса и широкими возможностями, Spinbetter – идеальный выбор для вас!
My homepage – https://spinbetterkh.com/
flood sms
Психолог онлайн доступен из любой точки мира. Детский психолог онлайн работает с особыми детьми.
твой психолог онлайн
cost cheap nexium without insurance
sms bomber
Онлайн-консультации с психологом — это удобно. Детский психолог онлайн поддержит в семейных конфликтах.
анастасия психолог калуга
sms bomber
Психолог онлайн даст совет в сложный момент. Детский психолог онлайн разберется с детской тревогой.
онлайн консультация психолога по отношениям
sms bomber
Useful info. Lucky me I found your web site by chance, and I’m surprised why this coincidence did not happened in advance!
I bookmarked it.
Medicament prescribing information. Drug Class.
cost of generic anastrozole without a prescription
Some what you want to know about pills. Read here.
flood sms usa
Онлайн-психолог — ваш ключ к успеху. Детский психолог онлайн поможет ребенку преодолеть стресс.
психолог онлайн тревога
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 2582 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://diplomygoznak9.ru/]Пишите нам[/url] — ответим быстро, без лишних формальностей.
Психолог онлайн поможет справиться с депрессией. Детский психолог онлайн найдет общий язык с подростками.
детский психолог онлайн отзывы
can i purchase mentat without rx
Онлайн-психолог — ваш помощник в жизни. Детский психолог онлайн поможет ребенку с социализацией.
где искать психолога онлайн
Контакторы
Розы в колбе – оригинально и долговечно, идеальный вариант для офиса!
купить розы в томске
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 4595 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://diplomykupit8.ru/]Уточнить здесь[/url] — ответим быстро, без лишних формальностей.
where to get cheap prednisone online
прихожие под заказ
Доставили на работу – коллеги завидовали такому красивому букету!
доставка цветов в томске
http://xn--48-6kcd0fg.xn--p1ai/forums.php?m=posts&q=30718&n=last#bottom
melbet [url=melbet3007.com]melbet3007.com[/url]
get cheap tadora without insurance
mostbet uz shaxsiy kabinet kirish [url=http://mostbet4071.ru]http://mostbet4071.ru[/url]
Контакторы
Качество и скорость на высоте!
розы томск
Розы в шляпной коробке с фруктами – свежесть и сладость в одном!
розы томскрозы в Томске
where to get cheap forxiga without dr prescription
Medicament information. Generic Name.
methocarbamol leaflet
Actual what you want to know about medication. Get information here.
Заказала редкие тюльпаны – пришли идеальные!
доставка цветов в томске
прогноз на спорт сегодня бесплатно [url=prognozy-na-sport-2.ru]prognozy-na-sport-2.ru[/url] .
прогнозы на спорт 100 процентов проходимость бесплатно [url=http://www.prognozy-na-sport-3.ru]прогнозы на спорт 100 процентов проходимость бесплатно[/url] .
Розы с доставкой в больницу – лучший рецепт для выздоровления!
белые розы купить томск
sms bomber
Спасибо за цветы к открытию кафе!
доставка цветов в томске
Онлайн-психолог — это забота о душе. Детский психолог онлайн поддержит в период изменений.
кризисный психолог онлайн
https://www.reverbnation.com/cfeawdqsz
kraken darknet
sms bomber
Онлайн-психолог — это забота о вас. Детский психолог онлайн разберется с детскими страхами.
педагог психолог калуга
bomber sms
kraken vk4
mostbet qeydiyyat necə olur [url=https://www.mostbet4055.ru]https://www.mostbet4055.ru[/url]
С психологом онлайн вы обретете равновесие. Детский психолог онлайн поможет с детскими фобиями.
личный психолог онлайн
where buy omnicefs for sale
bomber sms
kraken сайт
Meds prescribing information. Brand names.
where can i buy generic ventolin tablets
Everything information about drugs. Read now.
С психологом онлайн вы почувствуете уверенность. Детский психолог онлайн разберется с детской стеснительностью.
анонимный детский психолог онлайн
usa sms bomber
кракен зеркало
[url=https://medicway.shop/#]lupitros cheap no prescription[/url] prescription drugs online without prescription drugs online without rx canadian pharmacy
bomber sms
Психолог онлайн даст совет в сложный момент. Детский психолог онлайн разберется с детской тревогой.
помощь психолога онлайн
Молниеносная обработка заказа.
доставка цветов томск
https://www.reverbnation.com/cfeawdqsz
can you buy cheap celebrex without a prescription
sms bomber
Medicament information leaflet. Cautions.
can i order divalproex tablets
Actual news about medication. Get here.
https://lovimani.ru/
http://gazeta.ekafe.ru/viewtopic.php?f=110&t=41567
Real-time optimization ensures every campaign remains agile and impactful across platforms.
https://carlton-cambridgeshire.org.uk/index.php?title=User:AmandaSpooner
https://urwoman.ru/
https://iti.vnu.edu.vn/mediawiki/index.php?title=Trump%E2%80%99s_2024_Campaign_Elon_Musk%E2%80%99s_Success_19W's comparison of marketing to presidential campaigns adds a new depth to brand strategy discussions.
how to get cheap endep pill
Political success depends on storytelling—FlyX brings this same storytelling to brands.
http://youtools.pt/mw/index.php?title=User:JohnieAviles
Розы с карамельными яблоками – сладкий осенний подарок!
кустовые розы купить в томске
Спасибо за срочный заказ – привезли за час, хотя я заказывала утром 8 марта!
доставка цветов в томске
Meds information leaflet. Long-Term Effects.
venlafaxine and addiction
Best information about drugs. Get information here.
Лилии – свежесть 2 недели!
цветы
kraken 2025
С психологом онлайн вы откроете новые горизонты. Детский психолог онлайн поддержит в школьных проблемах.
психолог онлайн помощь в отношениях
flood sms
кракен сайт
sms bomber
Dove posso acquistare coversyl generico senza ricetta
Онлайн-консультация с психологом — это прогресс. Детский психолог онлайн научит ребенка самоконтролю.
психолог онлайн консультация записаться
flood sms
online prescirption websites https://medicway.shop/# foreign pharmacies online no prescriptions online pharmacy no prescription
kraken client
Онлайн-консультации с психологом — это прогресс. Детский психолог онлайн разберется с детскими переживаниями.
семейный психолог онлайн консультация
kraken vk2
Drug prescribing information. What side effects?
can i order cheap neurontin online
All trends of pills. Read information now.
kraken vk4
sms bomber
Психолог онлайн поможет справиться с паникой. Детский психолог онлайн разберется с детскими фобиями.
общение психолога анонимно онлайн
sms bomber usa
кракен vk5
flood sms
Онлайн-психолог — ваш путь к гармонии. Детский психолог онлайн поможет с учебными трудностями.
записаться к психологу калуга
flood sms
kraken vk6
Психолог онлайн поможет улучшить жизнь. Детский психолог онлайн разберется с детской стеснительностью.
психолог онлайн телеграм
kraken market
where buy cheap ashwagandha prices
flood sms
С психологом онлайн вы почувствуете себя лучше. Детский психолог онлайн научит ребенка решать конфликты.
выбор психолога онлайн
kraken ссылка
sms bomber
кракен даркнет
Психолог онлайн решит ваши проблемы. Детский психолог онлайн поддержит в школьных трудностях.
онлайн консультирование психолога
usa sms bomber
кракен онлайн
Medicine information leaflet. What side effects?
can i order generic lyrica for sale
All information about meds. Get now.
https://urwoman.ru/moda.html
Онлайн-психолог — это забота о вас. Детский психолог онлайн разберется с детскими страхами.
психолог онлайн рф
kraken vk6
sms bomber
Онлайн-психолог — это забота о душе. Детский психолог онлайн поддержит в период изменений.
анастасия психолог калуга
kraken vk5
usa sms bomber
кракен обмен
Онлайн-консультация с психологом — это просто. Детский психолог онлайн научит ребенка выражать чувства.
психолог онлайн тг
can you buy cheap biaxin without dr prescription
kraken client
Психолог онлайн всегда на связи с вами. Детский психолог онлайн поможет в детских конфликтах.
выбор психолога онлайн
банковские карты Казахстана для россиян
Банковские карты Казахстана для россиян можно оформить онлайн удаленно с доставкой в Россию, хотя многие банки Казахстана уже прекратили давать возможность открыть карту дистанционно. Можно сделать мультивалютную карту в банках Фридом Финанс, Алатау Сити банк, Форте, Береке банк. Банковскую карту Казахстана можно пополнить в рублях из российских банков (Сбербанка, ВТБ) по номеру карты или рублевым реквизитам.
кракен vk4
flood sms usa
Постоянный клиент – всегда доволен!
доставка цветов
Онлайн-консультация с психологом — это просто. Детский психолог онлайн поддержит в учебных трудностях.
детский психолог онлайн консультация
Свежесть – будто только что сорвали!
заказать цветы томск
sms bomber usa
кракен vpn
sms bomber
Онлайн-консультации с психологом экономят время. Детский психолог онлайн научит вашего ребенка справляться с эмоциями.
ваш психолог онлайн
Drugs information. Effects of Drug Abuse.
cheap sumatriptan no prescription
All news about medicament. Get information now.
Когда запой становится критическим, оперативное вмешательство имеет решающее значение для спасения здоровья и предотвращения необратимых последствий. Во Владимире экстренная помощь нарколога на дому позволяет быстро начать лечение, не требуя госпитализации, что особенно важно для пациентов, нуждающихся в сохранении конфиденциальности и комфорте.
Исследовать вопрос подробнее – http://vyvod-iz-zapoya-vladimir000.ru
кракен vk5
Психолог онлайн доступен из любой точки мира. Детский психолог онлайн работает с особыми детьми.
анастасия психолог калуга
kraken client
usa sms bomber
Онлайн-консультация с психологом — это прогресс. Детский психолог онлайн научит ребенка самоконтролю.
подбор психолога онлайн
usa sms bomber
anti-inflammatory medications for copd
Скидки для постоянных клиентов – это круто! Уже третий раз беру машину у вас.
https://itformula.ca/index.php?title=Autorent_88a
Прокатил на Porsche – ощущения невероятные! Спасибо за такую возможность.
http://13minhchau.com/index.php?title=Autorent_47F
Машины чистые, заправленные, сразу готовые к поездке.
https://playmobilinfo.com/index.php/Autorent_9I
Ищете, как быстро подарить радость?
[url=https://salda.ws/article/?act=read&article_id=28370]купить букет СЃ доставкой РЅР° РґРѕРј[/url] – отличная статья на эту тему.
Это находка для ценителей ярких эмоций.
Советуем прочитать о том, почему этот сервис выбирают тысячи клиентов.
Быстрая и аккуратная доставка по городу, а композиции радуют глаз.
Оформляйте онлайн — удивляйте близких!
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 3888 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://inforepetitor21.ru/]По ссылке[/url] — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 1784 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://spbrcom22.ru/]Купить дипломы о высшем образовании в Москве[/url] — ответим быстро, без лишних формальностей.
Понравилось, что все машины новые и ухоженные.
https://carlton-cambridgeshire.org.uk/index.php?title=Autorent_88F
Medicines information for patients. What side effects?
can you get cheap arimidex without a prescription
Some about medication. Get now.
Удобный сайт и приятные цены – рекомендую всем!
букет цветов томск
процедура открытия карты в Казахстане
Банковские карты Казахстана для россиян можно оформить онлайн удаленно с доставкой в Россию, хотя многие банки Казахстана уже прекратили давать возможность открыть карту дистанционно. Можно сделать мультивалютную карту в банках Фридом Финанс, Алатау Сити банк, Форте, Береке банк. Банковскую карту Казахстана можно пополнить в рублях из российских банков (Сбербанка, ВТБ) по номеру карты или рублевым реквизитам.
cordarone infarmed
Аромат просто божественный!
букет цветов томск
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 3704 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://kupludiplom6.ru/]Сайт компании[/url] — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 2776 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://diplomygoznak11.ru/]Купить диплом о высшем образовании[/url] — ответим быстро, без лишних формальностей.
Hi there! [url=https://ivermectinfix.shop/#]ivermectin[/url] good site.
Medicine information for patients. Drug Class.
azithromycin in bronchiolitis obliterans syndrome after hematopoietic sct
Some information about medicament. Read here.
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 3497 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://spbrcom22.ru/]Купить диплом о среднем[/url] — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 4145 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://spbrcom21.ru/]Купить диплом о среднем образовании[/url] — ответим быстро, без лишних формальностей.
where to get cheap deltasone tablets
porno
Meds prescribing information. Brand names.
can you buy cheap phenytoin without a prescription
All what you want to know about medication. Read information now.
where can i buy generic furosemide
мосбкт [url=https://mostbet4073.ru]мосбкт[/url]
Какой https://wiki.snooze-hotelsoftware.de/index.php?title=Benutzer:LiamWaterhouse5 выбрать для аэропресса? Хочу яркий вкус.
прямой поиск кандидата
ordina keflex generico senza ricetta
Букет – просто космос!
розы томск
определение карьерные стратегии
задачи карьерной стратегии
источники прямого поиска кандидатов
планирование стратегии карьерного роста
карьерных стратегий
карьерные стратегии трамплин
карьерный стратегия
хэдхантинг метод прямого поиска кандидатов на вакантные должности
Сердце из роз – самый романтичный подарок, слезы радости гарантированы!
купить розы в томске
1win պաշտոնական կայք [url=https://www.1win3072.ru]https://www.1win3072.ru[/url]
Доставили в -30 градусов, но цветы не пострадали – упаковка была надежная!
доставка цветов в томске
porno
цель карьерной стратегии
стратегии карьерного роста
стратегии достижения карьерного роста
план карьерной стратегии
планирование карьерной стратегии
понятие карьерной стратегии
карьерные стратегии
карьерная стратегия лестница
how to buy cheap rizact tablets
Meds information sheet. Brand names.
metformin causing irregular periods
Actual trends of pills. Read now.
ai therapy chat [url=ai-therapist23.com]ai therapy chat[/url] .
карьерные стратегии и тактика
этапы карьерной стратегии
Спасибо за розы в коробке с украшениями – два подарка в одном!
белые розы купить томск
where to get astelin
Спасибо за винтажную композицию – благородно!
доставка цветов в томске
mostbet parol tiklash [url=http://mostbet4074.ru/]http://mostbet4074.ru/[/url]
войти в 1вин [url=www.1win3069.ru]войти в 1вин[/url]
Medicament information leaflet. What side effects can this medication cause?
does hydroxyzine help with pain
Everything information about medicine. Read information now.
Знайшов статтю про подорожі – одразу захотілося в мандри! До речі, [url=https://xyzdigitalmedia.com/]в них[/url] ще багато корисного про туризм.
Ola, jogadores!
Enquanto jogava em maquinas caca-niqueis, percebi que o chave para um jogo eficaz e seguir um plano claro.
Recursos que se tornaram uteis para mim:
http://blog.paczkowscy.pl/index.php/2025/07/online-casino-nederland-zonder-cruks-speel-veilig-8/
Esses analises me ajudaram a melhorar minhas chances. Eles abordaram topicos como volatilidade das maquinas, o que me permitiu jogar com mais confianca. Se voce tambem quer jogar com mais consciencia, recomendo aprender com a experiencia de outros jogadores. Esse e o seu momento chave rumo a um sucesso.
Jogue com inteligencia e aproveite o processo!
Meds information sheet. Long-Term Effects.
can i buy generic indomethacin pills
Actual what you want to know about drugs. Read now.
Промокоды на бесплатные ставки онлайн
https://remontkomand.kz/ Полный комплекс услуг для ремонта недорого высокое качество с ремонт квартир в Алматы и без предоплаты.
Trade Smarter with theoption Binary Option Platform
Theoption offers a clean and easy-to-use interface for binary
options trading, ideal for beginners and experienced users alike.
Its quick execution and short-term trades provide opportunities
for fast returns. With mobile compatibility, users can trade on
the go with confidence. The platform’s high payout rates and
low entry barriers make it attractive to many traders. For
helpful insights and updated resources, be sure to visit
chokuyomi.jp. https://chokuyomi.jp/
Промокод на бесплатную ставку
https://droptopsite1.ru/
Промокод на бесплатную ставку
https://remontkomand.kz/ Полный комплекс услуг для ремонта с использованием современных материалов вторичные квартиры с прозрачные условия и мастера.
Trade Smarter with theoption Binary Option Platform
Theoption offers a clean and easy-to-use interface for binary
options trading, ideal for beginners and experienced users alike.
Its quick execution and short-term trades provide opportunities
for fast returns. With mobile compatibility, users can trade on
the go with confidence. The platform’s high payout rates and
low entry barriers make it attractive to many traders. For
helpful insights and updated resources, be sure to visit
chokuyomi.jp. https://chokuyomi.jp/
1win am [url=http://1win3071.ru/]1win am[/url]
Бесплатные ставки онлайн
Промокод на бесплатную ставку
Бесплатные ставки онлайн
Промокоды на бесплатные ставки онлайн
https://remontkomand.kz/ Профессиональная команда обеспечивает ремонт новостройки индивидуальный подход надежность и ответственность, качественно, с гарантией.
Trade Smarter with theoption Binary Option Platform
Theoption offers a clean and easy-to-use interface for binary
options trading, ideal for beginners and experienced users alike.
Its quick execution and short-term trades provide opportunities
for fast returns. With mobile compatibility, users can trade on
the go with confidence. The platform’s high payout rates and
low entry barriers make it attractive to many traders. For
helpful insights and updated resources, be sure to visit
chokuyomi.jp. https://chokuyomi.jp/
Лилии – свежесть 2 недели!
цветы томск
Medicines information leaflet. Brand names.
can i buy keflex pills
Some news about medicament. Get now.
can i purchase cheap celebrex pills
Trade Smarter with theoption Binary Option Platform
Theoption offers a clean and easy-to-use interface for binary
options trading, ideal for beginners and experienced users alike.
Its quick execution and short-term trades provide opportunities
for fast returns. With mobile compatibility, users can trade on
the go with confidence. The platform’s high payout rates and
low entry barriers make it attractive to many traders. For
helpful insights and updated resources, be sure to visit
chokuyomi.jp. https://chokuyomi.jp/
промокод 1win при регистрации [url=1win3070.ru]промокод 1win при регистрации[/url]
Сестра была в полном восторге.
заказать цветы с доставкой в томске
app for mental health support [url=https://mental-health21.com/]mental-health21.com[/url] .
Rent Jetour T2 black in Dubai
https://www.floristic.ru/forum/groups/moskva-d1134-energeticheskie-napitki-eazy-energy.html#gmessage1656
Car AC Repair
http://www.hristianka.ru/forum/m/113272/#msg_113272
porn live free
cam sex free
cam sex free
live xxx cam
lice porn
Salutations, joueurs !
Je viens de trouver un contenu exclusif avec des details tout frais sur le jeu Plinko chez les joueurs francais.
Si tu t’interesses a Plinko, cette lecture est fortement conseillee.
Consulte tout cela via le lien suivant :
https://firetech.co.bw/2025/06/26/plinko-s-thrilling-game-experience/
Amuse-toi avec les infos !
Medicine information for patients. Cautions.
is seroquel stronger than xanax
Actual what you want to know about medicines. Read here.
can you buy generic deltasone without insurance
porn libe
nudelivecam
Medicines prescribing information. Generic Name.
can i get zanaflex no prescription
Best what you want to know about medicines. Get information here.
live cams porn
free live nudes
cam to cam porn
Цветы доставили точно в указанное время – это очень ценно для занятых людей!
заказ цветов томск с доставкой
Как здорово, что есть место, где тебя понимают с полуслова!
http://dostavkacvetovtomsk70.ru – розы томск
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 3810 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://poligraf28.ru/]Где можна купить диплом[/url] — ответим быстро, без лишних формальностей.
buying cheap zocor without rx
Заказываю регулярно в разные города – всегда безупречное качество!
розы купить в томске
nude livecams
Best Car Detailing Service Dubai
Букет превзошел все ожидания – на фото красиво, а в реальности просто захватывает дух!
цветы
быстрая регистрация на мостбет [url=https://mostbet4081.ru/]https://mostbet4081.ru/[/url]
Luxury Car Protection Services
Best Car Polishing Service
Deep Car Wash Dubai
Meds information sheet. Long-Term Effects.
can you buy generic inderal without dr prescription
Some what you want to know about medicines. Get now.
винлайн фрибет [url=www.winlayne-fribet2.ru/]www.winlayne-fribet2.ru/[/url] .
get cheap nitroglycerin without rx
Розы с доставкой на работу – вызвали бурю комплиментов!
купить 101 розу в томске
Kush Casino offers live tables from Evolution [url=https://childcars.ru/]купить сиалис индийского производства[/url]
Спасибо за цветы с характером – точно отразили именинника!
доставка цветов в томске
Психолог онлайн всегда на связи. Детский психолог онлайн проведет сеанс с родителями.
общение с психологом онлайн
Dreaming of bold dreadlocks that stand out?
Take a look at [url=https://dreadlocksart.com]dreadlocks extensions[/url] — a one-stop dreadlocks shop.
Here you can explore a massive collection of dreadlock extensions and handmade dreads, including specialty options like ombre dreadlocks.
Choose from new dreads in various colors and textures — just right for anyone looking to buy dreads online or searching for dreadlocks for sale.
Want to change up your vibe? Opt for synthetic dreads for lightweight and easy styling,or shop de dreadlock extensions for a natural appearance.
Fans of [thedreadfulls] and daddy dreads will love these quality options and bold styles.
Not sure which fit to pick? Enjoy fast shipping, a wide variety, and standout styles—perfect whether you want dreads shop convenience or are ready to buy dreads online.
Find classic and trendy dreadlocks synthetic, all thoroughly reviewed by happy customers worldwide.
Curious about maintenance? The shop offers tips on caring for your dread extensions and extending their life, so your ombre dreadlocks stay looking amazing.
Take your style higher — buy your dreadlocks online at [url=http://dreadlocksart.com]fake dreads[/url] for originality and quality direct to your door.
kraken client
Medicines information. Long-Term Effects.
where can i get generic esomeprazole pills
Everything news about medicament. Get information here.
кракен 2025
Онлайн-психолог — это забота о вашем здоровье. Детский психолог онлайн поможет с социализацией.
консультация психолога калуга
кракен vk2
Онлайн-психолог — ваш путь к гармонии. Детский психолог онлайн поможет с учебными трудностями.
выбрать психолога онлайн
pilules d’ceftin bon marchГ©
gessi сантехника [url=https://gessi-santehnika-3.ru/]gessi-santehnika-3.ru[/url] .
Medication information sheet. Cautions.
lisinopril allergy symptoms
Some information about medication. Get information now.
Hi there, casino lovers !
I just found a detailed analysis of online casinos with bonuses for Greek players.
If you enjoy online casinos, this review is a must-read.
Access it via the link below:
https://www.effectiveratecpm.com/k8bre2ti7n?key=27b7fa6b5ea53e54cab997a551329c46/?p=15526
Букет “Розовый фламинго” – такой жизнерадостный и стильный!
розы томскрозы в Томске
how to buy cheap keflex
Спасибо за облако из органзы – невесомо!
доставка цветов в томске
Молочная продукция в запеканках — нежный вкус! http://taxwiki.us/index.php/Dostavka_3F
Розы с серебряными листьями – зимняя сказка среди лета!
белые розы купить томск
Meds prescribing information. Short-Term Effects.
can you buy rogaine
Some what you want to know about drug. Get information here.
Чай с пряностями — идеальный вечерний напиток! http://dogetransparency.wiki/index.php/User:AntonettaHovell
Птица с фруктами — праздничное блюдо супер! http://stephankrieger.net/index.php?title=Dostavka_98b
can you get cheap synthroid
Рыбный суп с бакалеей — ароматный и сытный! https://wikime.co/User:TheronBroyles45
Огромное спасибо за помощь в выборе – угадали с цветовой гаммой букета!
доставка цветов в томске
Муж был в восторге от сюрприза.
розы томск
Pills information for patients. Short-Term Effects.
how to buy cheap lopressor for sale
All what you want to know about medicine. Read information now.
comment obtenir des comprimГ©s d’amaryl
Ваши осенние букеты – это поэзия в цветах!
купить цветы в томске
Вы дарите не просто цветы – вы дарите частичку своей души!
букеты томск
суррогатная мама стоимость
Selidbe Beograd
Azino 777 — популярное онлайн-казино с впечатляющим выбором слотов, бонусами и удобным интерфейсом. Играйте и побеждайте!
азино777 мобильная версия
Azino 777 — популярное онлайн-казино с впечатляющим выбором слотов, бонусами и удобным интерфейсом. Играйте и побеждайте!https://anapa-lamanche.ru/
costo bactrim generico in vendita
Medicine information for patients. What side effects?
can you get cheap azelastine
All about drug. Get here.
Внимание к деталям впечатляет.
букеты томск
Спасибо за розы в корзине – удобно перевозить и смотрятся богато!
кустовые розы купить в томске
Заказывала для украшения свадьбы – сказочно!
доставка цветов в томске
can i purchase cheap elavil tablets
Hello. And Bye.Bonjour, amis !
Si vous voulez tout savoir sur les plateformes en France, alors c’est exactement ce qu’il vous faut.
Explorez l’integralite via le lien suivant :
http://www.selim.artcodeas.com/netbet-179/
Drug prescribing information. Generic Name.
can i get generic prevacid price
Actual trends of drug. Get here.
Спасибо за срочный заказ! Спасли мою забывчивость перед юбилеем родителей!
купить цветы томск
Курьер был очень вежлив и аккуратен.
доставка цветов томск
Букет был упакован с такой заботой, что разворачивала его с трепетом!
http://dostavkacvetovtomsk70.ru – розы купить в томске
battery betting app
как стать суррогатной матерью
Сервисные наборы для водо-масляных сепараторов Atlas Copco
Заказала мужу “мужской” букет – он был приятно удивлён!
цветы
Воздушно-масляные сепараторы Ceccato
Спасибо за пунктуальность! Для меня это показатель уважения к клиенту!
заказать цветы томск
Воздушно-масляные сепараторы Atlas Copco
1win armenia [url=1win3075.ru]1win armenia[/url]
Фильтры воздушные Atlas Copco
how long for lisinopril to take effect
Might be a little off-topic 🙂
Just recently I discovered a site https://kitchen-tips.chtonamstoit.site/.
It’s full of everything from fridge tips to spice storage.
Some sections I liked most:
– A checklist for tidy storage
Also here’s [url=https://kitchen-tips.chtonamstoit.site]this kitchen hacks hub[/url] — definitely worth exploring!
Anyone else a fan of kitchen organization?
купить права категории б
Ле Бандит — яркий слот с атмосферой французского казино, бонусами, фриспинами и шансом на крупный выигрыш
ле бандит демо
Sugar Rush – красочный слот с механикой cluster pays, где сладкие символы
приносят выигрыши и запускают каскады для ещё больших наград
шугар раш казино
https://franciscolhmcq.humor-blog.com/35107190/elevating-your-digital-presence-a-top-tier-search-engine-optimization-agency-in-dortmund-amplifying-google-visibility
Sugar Rush – красочный слот с механикой cluster pays, где сладкие символы
приносят выигрыши и запускают каскады для ещё больших наград
шугар раш казино
https://laneytgmd.mybloglicious.com/56377455/enhancing-your-online-visibility-a-premier-search-engine-optimization-agency-in-dortmund-elevating-google-visibility
Sugar Rush – красочный слот с механикой cluster pays, где сладкие символы
приносят выигрыши и запускают каскады для ещё больших наград
слот sugar rush
https://ahrefseo66461.loginblogin.com/43973252/enhancing-your-online-footprint-a-premier-search-engine-optimization-agency-in-dortmund-elevating-google-presence
Sugar Rush – красочный слот с механикой cluster pays, где сладкие символы
приносят выигрыши и запускают каскады для ещё больших наград
sugar rush demo
https://ahref-backlink08530.total-blog.com/enhancing-your-online-presence-a-leading-seo-agency-in-dortmund-elevating-google-visibility-61592826
https://teknologi99325.blogstival.com/57933908/the-pulse-on-the-globe-impartial-urgent-information-throughout-all-domains
Фильтры масляные Gardner Denver
cost elimite no prescription
хочу стать суррогатной матерью
battery casino india
купить права
sms bomber usa
https://macunak.by/
can i order generic diamox pill
flood sms usa
Магистральные воздушные фильтры Donaldson
Бонус для постоянных клиентов!
букет цветов томск
sms bomber
Фильтры воздушные BOGE
how can i get cheap omnicefs price
linebet app download apk
Salutations, passionnes de jeux en ligne !
Je viens de trouver une publication avec les nouveautes les plus chaudes sur le jeu Plinko chez les joueurs francais.
Si tu veux tout savoir sur ce jeu, cette lecture est a ne pas rater.
Lis tout cela via le lien ci-dessous :
http://www.demo6.ajency.in/plinko-avis-une-experience-ludique-et-captivante/
Profite bien !
Semper paratus. https://www.slimex-sibutramine.top/# O tempora! Vita brevis.
Looking for okbet? This is their only legit Facebook group
where buy cheap micronase tablets
888starz официальный сайт узбекистан [url=https://www.888starz-casino.com.ru]888starz официальный сайт узбекистан[/url] .
1win [url=http://1win3062.ru/]http://1win3062.ru/[/url]
Воздушно-масляные сепараторы Gardner Denver
Join the trusted Facebook group of okbet – all real, no spam
Магистральные воздушные фильтры Donaldson
is Levaquin safe to take
linebet online
ремонт телевизоров тошиба на дому [url=https://remont-toshiba-tv-moskva.ru/]ремонт телевизоров toshiba[/url] – профессиональный ремонт с гарантией качества.
Магистральные воздушные фильтры REMEZA
современная музыка скачать [url=https://mp3hill.ru/]современная музыка скачать[/url] .
Спасибо за вашу оперативность в праздничные дни!
доставка цветов томск
buy generic celebrex without prescription
Вы – профессионалы высочайшего уровня! Такого сервиса больше нет!
http://dostavkacvetovtomsk70.ru – розы томск
sms bomber
психолог запись онлайн
Ремкомплекты CompAir
Букет выглядел дорого и стильно – как из модного журнала!
розы томск
sms bomber
linebet login download
психолог онлайн телеграмм
Фильтры масляные FINI
Букет был так хорош, что его не разбирали – стоял как картина две недели!
купить цветы томск
sms bomber usa
психолог онлайн депрессия
Ремкомплекты Atlas Copco
buy trandate without prescription
linebet download
Заказываю регулярно в разные города – всегда безупречное качество!
заказать цветы с доставкой в томске
winline промокод на фрибет 2025 [url=www.kak-poluchit-fribet-v-winline-2025.ru/]www.kak-poluchit-fribet-v-winline-2025.ru/[/url] .
мостбет [url=http://students.com.kg/]http://students.com.kg/[/url]
oГ№ acheter de l’luvox bon marchГ© Г vendre.
Ваши букеты всегда вызывают бурю эмоций – от восторга до трогательных слез!
http://dostavkacvetovtomsk70.ru – заказать цветы с доставкой в томске
Спасибо за розы в коробке с украшениями – два подарка в одном!
розы томскрозы в Томске
Флорист подобрал идеальные тюльпаны – нежные, свежие, как будто только с клумбы!
доставка цветов в томске
глубинное водопонижение [url=http://www.vodoponizhenie-msk.ru]глубинное водопонижение[/url] .
водопонижение строительное [url=vodoponizhenie-moskva.ru]vodoponizhenie-moskva.ru[/url] .
камера холода [url=https://xn—-7sbabtdykncetibz6f4f8b.xn--p1ai/]камера холода[/url] .
внедрение erp стоимость [url=https://1s-erp-vnedrenie.ru]внедрение erp стоимость[/url] .
buying cheap atarax for sale
Букет из роз и суккулентов – модно и долговечно!
купить розы Томск
Доставили на работу – коллеги завидовали такому красивому букету!
доставка цветов в томске
how to get generic zithromax without a prescription
how to get dulcolax price
Букет выглядел дороже, чем стоил! Очень роскошное сочетание цветов!
купить цветы в томске
buy cialis soft tabs information
Заказала эксклюзивную композицию – выполнили просто безупречно!
цветы
mexican online pharmacy reviews https://mexicomedrx.shop/# trusted online pharmacy reviews pharmacy online
Очень красивая подарочная упаковка.
букет цветов томск
холодильная камера промышленная [url=https://xn—-7sbarc2alevbr6d.xn--p1ai]https://xn—-7sbarc2alevbr6d.xn--p1ai[/url] .
where buy isoptin price
1win [url=https://1win3063.ru/]https://1win3063.ru/[/url]
Thanks for the article. Here is a website on the topic – https://stalker-land.ru/
водопонижение скважинами [url=https://vodoponizhenie-msk.ru]водопонижение скважинами[/url] .
Join users who follow Plinko for official and secure updates
мостбет [url=http://fti.org.kg/]http://fti.org.kg/[/url]
how can i get generic atarax no prescription
Шедевр флористики!
заказать цветы томск
Заказала необычный букет – выполнили даже лучше, чем я представляла!
заказ цветов томск с доставкой
Kham pha cac bai vi?t d?c quy?n trong nhom Facebook chinh th?c c?a 188bet
Спасибо за высочайший профессионализм! Видно, что работают мастера!
букеты томск
Th?o lu?n, chia s? va c?p nh?t tin t?c cung c?ng d?ng 789bet chinh th?ng
Цветы пришли в идеальном состоянии, хотя ехали через весь город!
доставка цветов томск
Хочете дізнатися, як заощадити на квитках та отримати найкращі пропозиції? Всі секрети тут: [url=https://blog.veryuseful.website/]перейти[/url]!
Как здорово, что есть место, где тебя понимают с полуслова!
букеты томск
buy prednisone online without a prescription using a charge card
get generic floxin
купить 1с москва [url=https://kupit-1s21.ru/]https://kupit-1s21.ru/[/url] .
купить 1с онлайн [url=http://kupit-1s23.ru/]купить 1с онлайн[/url] .
1win [url=https://1win3064.ru]https://1win3064.ru[/url]
Заклёпки алюминиевые полукруглая головка купить в Екатеринбурге
can i get amaryl tablets
Medicament information. Drug Class.
how can i get generic dutasteride tablets
All what you want to know about medicines. Read information here.
radio tower
Kham pha n?i dung xac th?c va tro choi h?p d?n t?i Plinko – noi choi plinko game an toan
C?p nh?t tin t?c va khuy?n mai m?i nh?t t? trang chinh th?c Plinko
Trump Country 93.7
TuneIn
cost of macrobid no prescription
Мы предлагаем оформление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 942 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://uadiplom21.ru/]На этой странице[/url] — ответим быстро, без лишних формальностей.
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 3557 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://diplomykupit13.ru//]Купить срочно диплом о высшем образовании вуза[/url] — ответим быстро, без лишних формальностей.
FOX News Radio
radio tower
Medicament information for patients. What side effects can this medication cause?
omeprazole not helping gerd
Best what you want to know about medicine. Read information here.
Горячекатаная проволока купить
Флорист подобрал идеальные тюльпаны – нежные, свежие, как будто только с клумбы!
доставка цветов в томске
авто из сша минск наличие
купить авто из сша в наличии в минске
цена авто в сша в минске
888starz скачать [url=www.888starz-english.com]888starz скачать[/url] .
авто из сша минск
ставки на спорт прогнозы [url=http://prognoz-na-segodnya-na-sport10.ru/]ставки на спорт прогнозы[/url] .
cost amoxil without a prescription
авто из сша под ключ минск
Dogru topluluga ulasmak istiyorsan Grandpashabet grubuna gel
обучение нейросетям с нуля [url=https://www.www.linkedin.com/feed/update/urn:li:activity:7348197941213327360/]https://www.www.linkedin.com/feed/update/urn:li:activity:7348197941213327360/[/url] .
Medicines information for patients. Brand names.
can i take amitriptyline with diazepam
All information about medicine. Read here.
Заказала букет маме – она плакала от счастья! Вы дарите самые искренние эмоции!
купить цветы томск
Медные заклёпки на заказ
Спасибо за доставку в ночное время – очень выручили!
доставка цветов в томске
methylprednisolone
Букет из роз и лилий – королевское сочетание для королевской особы!
купить розы Томск
Заказала недорогой вариант, но выглядел букет очень достойно!
доставка цветов в томске
https://teletype.in/@alenacherny/gde_arendovat_auto_v_Sochi
восстановление авто из сша минск
авто из сша минск купить
купить авто из сша в минске наличии с растаможкой
Цветы приходят как на картинке, даже лучше!
заказать цветы с доставкой в томске
This is the only official group for bk8 – follow for accurate info
Гладкая арматура купить
where can i get albuterol price
https://teletype.in/@alenacherny/gde_arendovat_auto_v_Sochi
https://volos-news.ru/partnery/plyusy-oformleniya-dolgosrochnyh-zajmov.html
https://starbank.ru/zayavka-na-kredit/polnyj-put-k-polucheniyu-zajma-v-mfo.html
https://novosibirsk-news.net/other/2023/08/03/246836.html
https://telegraf.news/press-relizi/preimushhestva-loancompas/
https://kredit-on.ru/zaymy-na-kivi-bez-karty-bystro-i-udobno-poluchite-dengi/
DATING
https://aquietrabalho.com/art/code_promotionnel_d_inscription_1xbet.html
Понравился большой выбор композиций на сайте.
заказать цветы томск
Заказала 101 розу – доставили вовремя, все цветы свежие и ароматные!
кустовые розы купить в томске
buying imitrex prices
Заказывала редкостные орхидеи – пришли в идеальном состоянии!
доставка цветов в томске
Лучший подарок для близких!
доставка цветов в томске
https://gid.volga.news/696408/article/dlya-kakih-celej-vybirayut-onlajn-zajmy.html
перевозка автомобиля автовозом по россии [url=http://www.avtovoz-av8.ru]http://www.avtovoz-av8.ru[/url] .
http://cdtritm.ru/CeraBox/pages/?vybiraem_detskiy_kupalynik.html
DATING
pure ashwagandha with black pepper
https://amt-games.com/news/le-code-promo-1xbet-actuel.html
get cheap endep for sale
Просто огонь! Такой красоты!
цветы томск
Спасибо за пунктуальность – это показатель уважения!
букет невесты
Очень понравился сервис – курьер такой вежливый, цветы передал с улыбкой!
доставка цветов в томске
Шикарный букет! Получатель был в полном восторге, розы просто свежайшие!
гипсофилы цена букета
Ваши цветы – лучший подарок!
заказать цветы с доставкой в томске
http://skags.ru/doc/pages/deystvuyshiy_promokod_1xbet_oficialnuy_sayt_registraciya_2021.html
https://telegra.ph/Rukoyatki-dlya-separatorov-07-31-3
DATING
https://telegra.ph/Centrobezhnye-pishchevye-nasosy-samovsasyvayushchie-ONCS-07-31-6
аналитика ставок на спорт [url=https://stavki-na-sport-prognozy1.ru/]https://stavki-na-sport-prognozy1.ru/[/url] .
https://telegra.ph/Nasosy-himicheskie-HM-07-31-2
where buy cheap feldene online
https://telegra.ph/SHesterni-dlya-separatorov-07-31-3
https://astra-hotel.ch/articles/code-promo-1xbet_bonus.html
Не всем известен факт: у сфинксов есть несколько разновидностей, отличающихся по типу кожи и форме тела. Есть более складчатые, есть почти гладкие — на любой вкус. Виды породы лысая кошка
https://www.drive2.ru/b/710494794215858822/
can you buy generic combivir pill
casino giri? [url=http://candy-casino-7.com/]http://candy-casino-7.com/[/url] .
доставка авто [url=https://avtovoz-av8.ru/]https://avtovoz-av8.ru/[/url] .
https://ru.redfoxoutdoor.com/information/news/c-dnem-alpinista/
https://maxxwin.org/
Ready for real excitement online? Dive into a free experience with [url=https://bubichat.com]sext chat[/url] — where fantasies never ends.
No signup. No limits. Just real people.
[img]https://bubichat.com/wp-content/uploads/2025/04/565.jpg[/img]
Looking for the faultless way to explore your wildest fantasies online?
Whether you’re into man-to-man excitement, join our [url=https://bubichat.com/gay-chat/]virtual sex for gays[/url] and dive into unfiltered conversations right now.
Fancy something a little different, [b]Shemale or Ladyboys[/b]? Our [url=https://bubichat.com/shemale-chat/]Shemale virtual sex[/url] is filled with seductive trans users ready to make your night unforgettable.
For our [b]Spanish-speaking visitors[/b], don’t miss [url=https://es.bubichat.com/]Videochat para adultos[/url] – a intimate paradise of pleasure, 100% en espanol.
[b]Germans[/b], your desires matter too – join [url=https://de.bubichat.com/]Intimer Videochat[/url] and enjoy wild moments with real users from Germany and beyond.
Ladies who love ladies – we got you covered. [url=https://bubichat.com/lesbian-chat/]Private lesbian chat[/url] is your friendly space to chat, flirt, and get closer.
[b]Для русских[/b] [url=https://rus.bubichat.com/]Виртуальный секс чат[/url] – похотливое место для вирта русскоязычных пользователей 24/7.
Don’t miss your chance to join the hottest adult chat community online. Bubichat.com is waiting for you – real people, real fun, no limits.
[b]!!! Click now and turn your fantasies into reality. !!![/b]
Source https://bubichat.com/
application 888starz [url=https://888starz-official.pro]https://888starz-official.pro[/url] .
электрические карнизы для штор в москве [url=www.elektrokarnizy777.ru]www.elektrokarnizy777.ru[/url] .
acheter des comprimГ©s d’flagyl
casino candy [url=https://candy-casino-2.com/]https://candy-casino-2.com/[/url] .
Australia travel guide [url=https://australiatours.com]https://australiatours.com[/url] .
https://www.drive2.ru/b/710494794215858822/
https://audium.com/img/pages/1xbet_promo_code_ghana.html
купить винтовые сваи цена [url=www.ostankino-svai.ru /]www.ostankino-svai.ru /[/url] .
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 2779 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://inforepetitor28.ru/]Где купить диплом о высшем образовании[/url] — ответим быстро, без лишних формальностей.
https://maxxwin.org/
Оформиление дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 1895 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://spbrcom28.ru/]Купить дипломы о высшем образовании в Москве[/url] — ответим быстро, без лишних формальностей.
Мы предлагаем оформление дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 1107 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://spbrcom31.ru/]Здесь[/url] — ответим быстро, без лишних формальностей.
https://sviluppoleadership.com/pag/?1xbet_free_promo_code_sign_up_bonus.html
Quickly translate medicine names between regions.
arimidex
where buy cheap aceon without dr prescription
Накрутка реакций Телеграм бесплатно вот статья: https://vc.ru/niksolovov/1284850-nakrutka-reakcii-telegram-besplatno-top-19-servisov-2025-goda-silnyi-post Только проверенные бесплатные и платные способы получить больше подписчиков.
A continuously updated clinical drug database.
pocketdrug
Reverse?calculates A1C from average glucose. hba1c diagnosis thresholds converter
A practice?oriented pharmacology digest.
modern medication guide
Look up what a drug is called in different markets.
do i need a prescription for amoxil
Clinical focus in a truly pocket format.
modern medication guide
Handy A1C converter for clinics, pharmacies, and classrooms. eag to a1c converter
All the key medication details, none of the clutter. https://pocketdrugguide.com/
Match brand names to international nonproprietary names.
prescription free prelone
Drug information that’s structured and easy to find.
pocketdrug
Provides quick checks for dose limits and maximum titration. anti diabetic
dove acquistare keflex economico prezzi
A helper for choosing the right drug and dose. https://pocketdrugguide.com/
Pocket tool for A1C unit and eAG conversions. how to convert a1c to glucose
From pediatrics to geriatrics, dose with confidence.
Pocket DrugGuide
A fast tool for IFCC–NGSP A1C unit conversion. hba1c % to mmol/mol
https://aquietrabalho.com/art/code_promotionnel_d_inscription_1xbet.html
Покупка дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 3835 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://spbrcom29.ru/]Обращайтесь[/url] — ответим быстро, без лишних формальностей.
1win онлайн [url=www.1win40002.ru]www.1win40002.ru[/url]
vidalista.pics: Vidalista 40mg usa – Vidalista black 80
buying cheap calan without insurance
крановое электрооборудование
Спасибо за индивидуальный подход – учли даже самые необычные пожелания!
цветы томск
Спасибо за поддержку в трудный момент!
доставка цветов в томске
Молниеносно доставили!
розы томск
casino candy [url=candy-casino-7.com]candy-casino-7.com[/url] .
https://institutocea.com/layouts/inc/?internet_televidenie.html
buy cheap tofranil without a prescription
Букет “Винтажная роза” – благородные оттенки старины!
купить 101 розу в томске
винлайн какие бонусы [url=www.winline-fribet-novym-klientam.ru/]www.winline-fribet-novym-klientam.ru/[/url] .
https://dpstudio-fashion.com
элконтсервис
https://victor-habitat.com
Мені завжди було цікаво, чому взаємозв’язок гравітації та чорних дір. Нарешті знайшов відповідь тут: [url=https://help.veryuseful.website/]Як працює гравітація[/url].
https://fgvjr.com
элконтсервис
недорогая медицинская одежда в санкт петербурге
https://www.krizia.it
крановое электрооборудование
https://gamificationnation.com
Заказала розы для украшения зала – превзошли все ожидания!
купить розы в томске
https://astra-hotel.ch
скачать мелбет последняя версия [url=http://melbet1033.ru]скачать мелбет последняя версия[/url]
amoxil 1000mg for sale
https://www.cricketweb.net
brand amoxil
https://www.cricketweb.net
buy amoxil 250mg generic
элконтсервис
крановое электрооборудование
Скачать Мостбет
http://fabnews.ru/forum/showthread.php?p=101039#post101039
https://bioniclerpg.getbb.ru/viewtopic.php?f=6&t=7159
https://forum.rarib.ru/viewtopic.php?f=2&t=129354
http://center-2.ru/forum/?mingleforumaction=viewtopic&t=21751#postid-41407
винтовые опоры фундамента [url=https://www.ostankino-svai.ru ]https://www.ostankino-svai.ru [/url] .
https://sportsfanbetting.com/tips/1xbet-promo-code-2026-welcome-bonus-100-up-to-e130/
Фантастические сериалы про космос — мой фаворит!
http://wiki.kurusetra.id/index.php?title=Ruseriya_4F
Мультфильмы в 4K качестве, картинка просто потрясающая.
https://codeforweb.org/mediawiki_tst/index.php?title=Ruseriya_40B
что такое фрибет в винлайн [url=www.winlayne-fribet.ru/]www.winlayne-fribet.ru/[/url] .
Криминальные сериалы затягивают, каждый эпизод — интрига.
http://whatsupskydiving.com/w/User:LavonLeverett23
Ужасы с жуткими монстрами, для смелых зрителей.
http://taxwiki.us/index.php/User:WallaceCroteau
winline букмекерская бонус [url=winline-bonus-za-registraciyu-2025.ru]winline букмекерская бонус[/url] .
бесплатная ставка винлайн [url=www.winline-fribet-kazhdyj-den.ru]www.winline-fribet-kazhdyj-den.ru[/url] .
30 букетов – все в восторге!
купить цветы томск
https://18.169.178.30/les-10-sorties-de-machines-a-sous-les-plus-5/
винлайн букмекерская бонус [url=http://www.winline-fribety-2025.ru]винлайн букмекерская бонус[/url] .
мелбет kg [url=www.melbet1035.ru]мелбет kg[/url]
https://possible11.com
https://telcoprofessionals.com
заказать трансляцию мероприятия [url=https://zakazat-onlajn-translyaciyu7.ru/]zakazat-onlajn-translyaciyu7.ru[/url] .
купить игровой компьютер [url=www.kupit-igrovoj-kompyuter10.ru]купить игровой компьютер[/url] .
https://institutocea.com/
https://redfordtheatre.com
zithromax 250mg tablets
https://777score.com
https://www.colehardware.com/
can i purchase cheap zithromax no prescription
где мои филки
https://andrzejwajda.pl/2025/07/18/pozdravi-v-verde-casino-app-tsentr-na-angazhiraschoto-i-sigurno-prikljuchenie-za-hazart/
https://lusitanohorsefinder.com/
https://www.saffireblue.ca
how to get cheap zithromax price
https://amoebas.co.za/2025/07/31/icecasino-16/
помощь наркозависимым
https://cascadeclimbers.com
乱伦色情
https://dordoonepet.com/pas-in-verde-casino-no-deposit-bonus-centrul-tu-de/
помощь наркозависимым
http://moksha.ru/
помощь наркозависимым
помощь наркозависимым
услуги онлайн трансляции [url=https://zakazat-onlajn-translyaciyu7.ru/]zakazat-onlajn-translyaciyu7.ru[/url] .
помощь наркозависимым
Как найти подписчиков в Телеграм канал вот статья: https://dtf.ru/top-smm/3145279-kak-naiti-podpischikov-v-telegram-kanal-top-27-proverennyh-servisov-v-2025-godu-novyi-reiting Только проверенные бесплатные и платные способы получить больше подписчиков.
помощь наркозависимым
乱伦色情
помощь наркозависимым
помощь наркозависимым
накрутить просмотры тг
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
лечение от наркотиков
помощь наркозависимым
лечение от наркотиков
помощь наркозависимым
purchase oral ivermectin http://ivermectinfix.shop/# ivermectin 6mg tablet for lice ivermectinfix
лечение от наркотиков
наркозависмость
помощь наркозависимым
накрутить просмотры тг
прикольные цветочные горшки [url=https://dizaynerskie-kashpo-sochi.ru]прикольные цветочные горшки[/url] .
наркозависмость
помощь наркозависимым
помощь наркозависимым
наркозависмость
наркозависмость
наркозависмость
наркозависмость
помощь наркозависимым
мелбет сайт [url=https://melbet1031.ru/]https://melbet1031.ru/[/url]
лечение от наркотиков
наркозависмость
помощь наркозависимым
лечение от наркотиков
лечение от наркотиков
помощь наркозависимым
лечение от наркотиков
наркозависмость
наркозависмость
помощь наркозависимым
лечение от наркотиков
лечение от наркотиков
помощь наркозависимым
Medicines information sheet. What side effects?
how to buy generic prednisolone price
Everything news about medication. Read here.
лечение от наркотиков
рулонная штора с электроприводом [url=https://rulonnye-shtory-s-elektroprivodom190.ru]https://rulonnye-shtory-s-elektroprivodom190.ru[/url] .
лечение от наркотиков
лечение от наркотиков
квартира на сутки https://avvestak.rs/2025/04/18/kvartiry-na-sutki-v-minske-500-bez-posrednikov/
дженерик сиалис 40мг с доставкой
по Санкт-Петербургу и Москве доступные цены высокое качество производства Индии
наркозависмость
Букет для лучшей подруги – эмоции через край!
доставка цветов в томске
наркозависмость
наркозависмость
автоматический карниз для штор [url=https://elektrokarniz150.ru/]https://elektrokarniz150.ru/[/url] .
наркозависмость
Kapsen — шины для самосвалов, недорогие и крепкие.
http://torrdan.net:80/index.php?title=Asiancatalog_69F
Sonix для грузовиков — отличный выбор для дальних рейсов.
https://cordobapedia.datta.capital/wiki/Usuario_discusi%C3%B3n:FUZRosaline
наркозависмость
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
наркозависмость
мостбеи [url=mostbet4080.ru]mostbet4080.ru[/url]
помощь наркозависимым
лечение от наркотиков
Medicament prescribing information. Generic Name.
where buy generic ursodiol without rx
Best news about pills. Read information now.
наркозависмость
Ваш сайт – образец удобства и продуманного интерфейса!
розы купить в томске
помощь наркозависимым
Надежно, быстро, качественно!
доставка цветов томск
Doublecoin для КамАЗ – отличные шины для дальних рейсов!
https://www.pokedexia.net/Benutzer:EssieKennemer50
ivermectinfix https://ivermectinfix.shop/# ivermectinfix ivermectinfix
помощь наркозависимым
наркозависмость
помощь наркозависимым
квартира на сутки https://blueskyhotelgh.com/sniat-kvartiru-na-sutki-v-minske-arenda-posutochno-bez-posrednikov-tseny/
Мы готовы предложить документы институтов, расположенных на территории всей Российской Федерации. Купить диплом университета:
[url=http://bnsgh.com/read-blog/21233_attestat-o-polnom-srednem-obrazovanii-kupit.html/]купить аттестат за 11 класс спб отзывы[/url]
организация интернет трансляций [url=https://zakazat-onlajn-translyaciyu8.ru]организация интернет трансляций[/url] .
лечение от наркотиков
L-Guard – долговечные шины для КамАЗ, рекомендую всем!
https://docs.brdocsdigitais.com/index.php/Asiancatalog_56J
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
наркозависмость
наркозависмость
наркозависмость
организация трансляции мероприятия [url=http://zakazat-onlajn-translyaciyu7.ru]организация трансляции мероприятия[/url] .
наркозависмость
лечение от наркотиков
лечение от наркотиков
order keflex for sale
fluconazole buy
наркозависмость
помощь наркозависимым
Meds information leaflet. Effects of Drug Abuse.
can i purchase cheap tadacip without prescription
Some what you want to know about medicine. Read here.
buy keflex 500 mg pills
buying fluconazole
помощь наркозависимым
buy keflex 250 mg online cheap
помощь наркозависимым
how to buy fluconazole
квартира на сутки https://blackenvelope.co.za/kvartiry-usad-by-kottedzhi-na-sutki-v-belarusi-posutochno-na-kvartirka-by/
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
Ваши букеты всегда вызывают бурю эмоций – от восторга до трогательных слез!
заказ цветов томск с доставкой
помощь наркозависимым
Букет – просто космос!
цветы томск
Medicines information. Cautions.
can i get cheap colchicine online
All information about drug. Get here.
помощь наркозависимым
помощь наркозависимым
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы даем гарантию, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 1613 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://inforepetitor31.ru/]Дипломы о высшем образовании купить[/url] — ответим быстро, без лишних формальностей.
Как здорово знать, что важный момент в надежных руках!
букет цветов томск
Купить новогодние украшения для дома в Москве легко через интернет магазин. Такой способ оформления дома создает уникальную атмосферу праздника.
[url=https://novogodnij-dekor.ru/]Новогодние украшения для дома интернет магазин[/url]
В онлайн-магазинах имеется большой выбор новогодних аксессуаров, от стильных гирлянд до винтажных игрушек. Это позволяет легко выбрать именно то, что вам нужно для вашего дома.
Онлайн-магазины часто проводят распродажи, на которых можно приобрести новогодние украшения по более низким ценам. Так вы сможете сэкономить средства, приобретая желаемые украшения.
Удобство интернет-шопинга заключается также в возможности доставки товаров прямо к вашему дому. Вы можете заказать любимые украшения, не тратя времени на поездки по магазинам.
Покупка дипломов ВУЗов В киеве — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 4927 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://inforepetitor35.ru/]Продажа дипломов[/url] — ответим быстро, без лишних формальностей.
помощь наркозависимым
квартира на сутки https://brilhanteeexcecional.pt/bali/2025/05/30/741-ob-iavlenie-sniat-kvartiru-na-sutki-v-minske-bez-posrednikov-posutochnaia-arenda-kvartir/
Покупка дипломов ВУЗов по всей Украине — с печатями, подписями, приложением и возможностью архивной записи (по запросу).
Документ максимально приближен к оригиналу и проходит визуальную проверку.
Мы гарантируем, что в случае проверки документа, подозрений не возникнет.
– Конфиденциально
– Доставка 3–7 дней
– Любая специальность
Уже более 4417 клиентов воспользовались услугой — теперь ваша очередь.
[url=http://spbrcom36.ru/]Купить диплом о образовании недорого[/url] — ответим быстро, без лишних формальностей.
помощь наркозависимым
Внимание к деталям впечатляет.
цветы томск
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
драгон мани
помощь наркозависимым
Букет для любимой – она сказала, что это самые красивые цветы в ее жизни!
доставка цветов в томске
https://www.u-turn.kz/forums.php?m=posts&q=33881&n=last#bottom
помощь наркозависимым
Извините, ничем не могу помочь. Но уверен, что Вы найдёте правильное решение.
Регулярно пополняйте счет. только те люди, которые играют на реальные деньги, [url=https://www.quangcao.cz/2025/07/24/pinko-kazino-oficialnyj-obzor-preimushhestva-i/]https://www.quangcao.cz/2025/07/24/pinko-kazino-oficialnyj-obzor-preimushhestva-i/[/url] время от времени становятся участником клуба.
рольшторы с электроприводом [url=https://rulonnye-shtory-s-elektroprivodom190.ru/]рольшторы с электроприводом[/url] .
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
https://www.bloggportalen.se/BlogPortal/view/BlogDetails?id=254426
электрические карнизы купить [url=https://elektrokarniz150.ru/]elektrokarniz150.ru[/url] .
помощь наркозависимым
драгон мани
dragon money
драгон мани
casa pariurilor bonus de bun venit [url=https://www.1win40007.ru]casa pariurilor bonus de bun venit[/url]
помощь наркозависимым
драгон мани зеркало
Спасибо за розы с доставкой на яхту – шикарно и романтично!
розы томскрозы в Томске
карниз с электроприводом [url=http://elektrokarnizy150.ru]http://elektrokarnizy150.ru[/url] .
драгон мани
помощь наркозависимым
помощь наркозависимым
dragon money
dragon money зеркало
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
https://kssp.borda.ru/?1-5-0-00002441-000-0-0-1751518849
организация трансляций [url=https://www.zakazat-onlajn-translyaciyu8.ru]организация трансляций[/url] .
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
оригинальные кашпо для цветов [url=http://dizaynerskie-kashpo-sochi.ru]оригинальные кашпо для цветов[/url] .
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
https://swordstoday.ie/unlocking-the-power-of-voip-how-to-buy-virtual-numbers-online/
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
https://forum.prosochi.ru/topic50118.html
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
https://ustechportal.com/power-of-virtual-phone-numbers-in-australia/
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
помощь наркозависимым
https://www.computerhowtoguide.com/virtual-voip-number-for-telegram/
https://www.facebook.com
драгон мани зеркало
Спорткомплекс «Терек»
драгон мани официальный сайт
data-vyhoda.online [url=www.data-vyhoda.online/]www.data-vyhoda.online/[/url] .
драгон мани зеркало
Читерский [url=www.chiterskiy.ru/]www.chiterskiy.ru/[/url] .
https://www.linkedin.com
помощь наркозависимым
помощь наркозависимым
demo zeus vs hades
драгон мани официальный сайт
помощь наркозависимым
dragon money промокод
dragon money официальный сайт
помощь наркозависимым
zeus vs hades demo в рублях
Настоящие подписчики в ТТ делают аккаунт привлекательнее для рекламы.
живые подписчиков в вк
помощь наркозависимым
накрутка подписчиков вк
помощь наркозависимым
Газовые печи отопления с горелкой
ломбард часов
помощь наркозависимым
помощь наркозависимым
Печь для бани с горелкой
перспектива ломбард
ISTRIPPER MOBILE
помощь наркозависимым
http://daones.gaming.free.fr/index.php?file=Members&op=detail&autor=ewibav
дизайнерский горшок [url=www.dizaynerskie-kashpo-sochi.ru]дизайнерский горшок[/url] .
Котлы наружного применения
помощь наркозависимым
ISTRIPPER MOBILE
помощь наркозависимым
1win app promo bilan [url=https://1win3065.ru]https://1win3065.ru[/url]
помощь наркозависимым
http://m1bar.com/index.php?subaction=userinfo&user=enamor
https://bio.site/jahcnohocuhy
https://pxlmo.com/ladawnpriego1997
https://www.band.us/page/99488714/
online pharmacy http://trustmxpharma.shop/# trustmxpharma trustmxpharma
https://www.band.us/page/99498680/
Hope you don’t mind a kitchen-related tip
Just a few days ago I came across a site https://kitchen-tips.chtonamstoit.site/.
It’s full of super clear advice on storage and cleaning.
Some sections I liked most:
– A checklist for tidy storage
Also here’s [url=https://kitchen-tips.chtonamstoit.site]this kitchen hacks hub[/url] — definitely worth exploring!
Anyone else a fan of kitchen organization?
http://mange-disque.tv/forums/viewtopic.php?pid=465915#p465915
https://www.brownbook.net/business/54138570/купить-кокаин-марихуану-мефедрон-муйне/
https://potofu.me/wni2xhrr
https://git.project-hobbit.eu/ibeyhudye
https://www.band.us/band/99520527/
http://bobscity.free.fr/index.php?file=Members&op=detail&autor=ivuhokew
online mexican pharmacy https://cse.google.nr/url?sa=t&url=https%3A%2F%2Fmexicomedrx.com mexicomedrx mexicomedrx
https://ucgp.jujuy.edu.ar/profile/abobyhngyb/
https://www.rwaq.org/users/schmidtjayce54-20250802101321
https://community.wongcw.com/blogs/1123816/%D0%9B%D0%B8%D1%82%D0%B2%D0%B0-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83
https://www.minds.com/group/1793713869577904128/latest
https://pxlmo.com/GreenWandaGreenjanuary08
https://community.wongcw.com/blogs/1126238/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%91%D0%BE%D1%88%D0%BA%D0%B8-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83-%D0%93%D0%B0%D1%88%D0%B8%D1%88-%D0%9B%D0%B0%D1%80%D0%BD%D0%B0%D0%BA%D0%B0
https://imageevent.com/ariyanivania/jxjpq
https://www.silverstripe.org/ForumMemberProfile/show/251607
https://dreambergesonfashion11.bandcamp.com/album/arson
https://www.band.us/band/99489423/
ремонт гостиной ремонт гостиной
Anvelope 265/45 R21
https://www.band.us/page/99531507/
Шины Tristar
http://dvi.dp.ua/wr_board/tools.php?event=profile&pname=yfuzid
[url=https://images.google.co.ke/url?sa=t&url=https%3A%2F%2Fmexicomedrx.shop]mexicomedrx[/url] mexicomedrx mexicomedrx mexicomedrx
https://git.project-hobbit.eu/jlyyacahug
https://fashionfad.ru/poleznoe/cardirin-kupit-naturalnye-kapli-dlya-norm
ремонт гостиной ремонт гостиной
Anvelope Bearway
https://hoo.be/degdjfpadnuu
শুভ দিন!
[url=https://digitalpokerclub.cfd/]রিয়েল ক্যাসিনো[/url]
এই লিঙ্কটি পড়ুন – https://digitalpokerclub.cfd/
অনলাইন ক্যাসিনো খেলা
অনলাইন ক্যাসিনো অ্যাপ
রিয়েল ক্যাসিনো
শুভকামনা!
শুভ দিন!
[url=https://jackpotslotsonline.cfd]অনলাইন ক্যাসিনো সাইট[/url]
এই লিঙ্কটি দেখুন – https://jackpotslotsonline.cfd/
অনলাইন ক্যাসিনো গেম
অনলাইন ক্যাসিনো খেলা
অনলাইন ক্যাসিনো অ্যাপ
শুভকামনা!
https://paper.wf/ucfihoioo/genuia-kupit-gashish-boshki-marikhuanu
Anvelope 225/45 R18
срочный ремонт квартиры
https://noprost.com/news/obzor-cardirin-naturalnye-kapli-dlya-borby-s-gipertoniej-i-normalizaczii-davleniya.html
Anvelope 275/35 R21
https://muckrack.com/person-27409217
Anvelope Aoteli
https://odysee.com/@iteshiliuvin:88a6327eae5043c1d8d5109f57fc0feb247819f0?view=about
https://kid-info.ru/zdorovie/lichnyj-dnevnik-kak-cardirin-pomog-mne-zabyt-o-gipertonii.html
https://www.band.us/band/99499093/
https://ucgp.jujuy.edu.ar/profile/obebsybobiho/
Дивно, що [url=https://help.veryuseful.website/]чому гравітація така важлива[/url] працює однаково на Землі та у відкритому космосі.
https://www.brownbook.net/business/54135105/купить-кокаин-гуанчжоу/
https://starscurls.ru/poleznye-sovety/rekomendacija-specialista-cardirin-jeffektivnoe-naturalnoe-sredstvo-ot-gipertonii.html
https://git.project-hobbit.eu/hochuydybaho
https://potofu.me/bjxmdww5
https://www.rwaq.org/users/hankeaton19-20250802221750
https://say.la/read-blog/122231
https://git.project-hobbit.eu/nycuucrqgoco
casa pariurilor download [url=https://1win40008.ru/]https://1win40008.ru/[/url]
https://bio.site/xedihoaci
Meds information leaflet. Short-Term Effects.
buy rogaine for sale
All trends of medicines. Get information now.
https://ucgp.jujuy.edu.ar/profile/fecxkmacybif/
Drug prescribing information. Effects of Drug Abuse.
can i purchase cheap trileptal no prescription
Actual information about meds. Read information here.
Привет!
[url=https://clasicslotsonline.cfd/]vavada казино онлайн казахстан вход[/url]
Здесь подробней: – https://clasicslotsonline.cfd/
vavada казино онлайн казахстан вход
топ онлайн казино казахстан
10 лучших казино онлайн казахстан
Будь здоров!
https://community.wongcw.com/blogs/1123800/%D0%9A%D1%91%D0%BD%D0%B4%D0%B6%D1%83-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83-%D0%93%D0%B0%D1%88%D0%B8%D1%88-%D0%91%D0%BE%D1%88%D0%BA%D0%B8
https://www.band.us/band/99512865/
אותה מהמועדון, הכנסתי אותה למונית, אמרתי לה לחכות, חזרתי להביא את הארנק, הזהרתי את כולם שאחזור הכחישה. לא תירוצים. וזה היה הגרוע מכל. הוא צעד לעברה ותפס את פרק כף היד. עורה היה חם, לח מזיעה, All types of erotic massages are available
https://git.project-hobbit.eu/agzgbyft
Pills information sheet. Drug Class.
promethazine codeine drink
Best news about medication. Read information here.
https://www.brownbook.net/business/54138544/купить-экстази-кокаин-амфетамин-андорра/
https://paper.wf/yflxadebmaf/antaliia-kupit-gashish-boshki-marikhuanu
Доставили к завтраку – романтичное утро удалось!
доставка цветов в томске
https://say.la/read-blog/123321
Drugs information for patients. Effects of Drug Abuse.
how to get generic fexofenadine
Actual trends of medication. Get here.
https://www.rwaq.org/users/cedrichancock0-20250802223759
Meds information. Drug Class.
buying proscar no prescription
Everything information about drug. Get information now.
https://hub.docker.com/u/BonnieBlairBon
https://www.band.us/band/99530830/
https://pxlmo.com/puilamkansil
medicway https://images.google.tk/url?sa=t&url=https%3A%2F%2Fmedicway.shop medicway medicway
https://hoo.be/hehidyuf
Medication prescribing information. Long-Term Effects.
where buy generic tamoxifen online
Some what you want to know about drugs. Read information now.
https://ucgp.jujuy.edu.ar/profile/uceabtybsad/
Medicament prescribing information. Long-Term Effects.
paxil medication cost
Some what you want to know about pills. Get now.
https://paper.wf/ygofauhyuaei/chekhiia-kupit-kokain-mefedron-marikhuanu
https://say.la/read-blog/123043
finasteride tablets buy back
https://kemono.im/ibuuaefwi/bali-kupit-ekstazi-mdma-lsd-kokain
Meds information for patients. Drug Class.
can you get imitrex without prescription
Everything trends of drug. Get information now.
https://git.project-hobbit.eu/uuhodignoh
https://community.wongcw.com/blogs/1123332/%D0%91%D0%B8%D0%BB%D0%B1%D0%B0%D0%BE-%D0%BA%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8-%D0%91%D0%BE%D1%88%D0%BA%D0%B8
https://t.me/s/Webs_1win
https://www.passes.com/ikrarnwabu
vavada официальный сайт
[url=https://maps.google.de/url?q=https%3A%2F%2Fmedicway.shop]medicway[/url] medicway online mexican pharmacy online pharmacy
https://paper.wf/nyhnvahec/varshava-kupit-ekstazi-mdma-lsd-kokain
https://www.band.us/page/99507977/
Drug information sheet. Drug Class.
buying cheap phenytoin without dr prescription
Some trends of medication. Get here.
Прежде всего, важно разобраться, что именно представляет собой бренд Trassir. Судя по названию, речь идет скорее всего о системах видеонаблюдения или ПО для обработки видеоданных, хотя уверенности пока нет. Чтобы подготовить действительно качественное и информативное описание товара, мне нужны точные сведения о продукте: какие конкретно товары предлагает этот бренд, какие проблемы клиентов они решают, в чём заключаются уникальные особенности и преимущества перед конкурентами. Без понимания этих деталей сложно создать убедительное коммерческое предложение, которое бы выделяло продукт среди аналогов и давало покупателю ясное представление о пользе приобретения. Поэтому первым делом имеет смысл воспользоваться поиском в интернете, чтобы собрать всю необходимую информацию о бренде Trassir и его продукции.
undefined
Теперь у меня есть общее понимание о бренде [url=https://trassir-expert.ru/]Trassir[/url] — это российская компания, специализирующаяся на разработке и производстве систем видеонаблюдения. Продукция ориентирована преимущественно на корпоративный сегмент, предлагая комплексные решения для различных отраслей. Среди ключевых особенностей выделяются гибкая модульная архитектура, позволяющая настраивать систему под конкретные нужды, российское происхождение и соответствие отечественным нормативам, а также возможность интеграции с различными устройствами и платформами. Компания уделяет особое внимание сервисному обслуживанию, предоставляя гарантию сроком два года и поддерживая сеть авторизованных центров по всей стране. Для партнёров предусмотрены программы лояльности и регулярные образовательные мероприятия, что способствует укреплению доверия и долгосрочному сотрудничеству.
Однако имеющейся информации недостаточно, чтобы составить полноценное и привлекательное описание продукта. Мне необходимы дополнительные технические подробности: хотелось бы уточнить, какие именно модели камер представлены в линейке, какое максимальное разрешение обеспечивают устройства, насколько широк диапазон рабочих температур, какие технологии сжатия видео используются, а также какие интеллектуальные модули аналитики входят в состав системы. Эти данные важны, поскольку позволяют чётко позиционировать продукцию Trassir относительно конкурентов и подчеркнуть её реальные преимущества. Поэтому следующим шагом я проведу дополнительный поиск, сосредоточившись на технических характеристиках и уникальных функциях продуктов Trassir.
undefined
Собрав подробную информацию о бренде [url=https://trassir-expert.ru/]Trassir tr[/url], я теперь хорошо понимаю, почему эта компания занимает лидирующие позиции на рынке систем видеонаблюдения. Прежде всего бросается в глаза российский подход к производству: продукция соответствует отечественным стандартам и требованиям законодательства, что особенно актуально в условиях современных реалий. Модульная структура системы даёт клиентам ощутимую свободу в выборе компонентов, позволяя создавать решение, идеально подходящее под конкретные задачи. Это выгодно отличает Trassir от многих зарубежных аналогов, которые часто предлагают готовые комплекты без возможности тонкой настройки.
Ещё одно важное преимущество — широкий спектр возможностей видеоаналитики, основанной на нейросетях. Такие инструменты, как распознавание лиц, номеров автомобилей, определение отсутствия масок или касок, способны заметно повысить эффективность охраны и снизить риски нарушений. Особенно впечатляют такие модули, как детектор очередей и счётчики посетителей, которые делают систему не просто средством наблюдения, а настоящим помощником в управлении бизнесом.
Также нельзя обойти вниманием развитую инфраструктуру поддержки: двухлетняя гарантия, сервисные центры по всей России и квалифицированная помощь инженеров на всех этапах внедрения внушают доверие и снимают опасения по поводу возможных сложностей в эксплуатации. Всё это вместе делает Trassir привлекательным выбором для компаний разного масштаба и профиля деятельности.
Теперь, имея полную картину преимуществ и особенностей бренда, я готов приступить к написанию описания, которое подчеркнёт ключевые достоинства Trassir и сделает акцент на тех аспектах, которые наиболее ценны для потенциальных покупателей.
## ?? **Система видеонаблюдения [url=https://trassir-expert.ru/]Trassir tr[/url]: Безопасность, Контроль и Эффективность**
### ?? Что такое [url=https://trassir-expert.ru/]Trassir[/url]?
v**Trassir** — это российский производитель инновационных систем видеонаблюдения, предлагающий современные решения для комплексной безопасности предприятий и организаций различного масштаба. Продуктовая линейка Trassir отличается высоким уровнем надежности, функциональностью и адаптируемостью под специфические потребности каждого клиента.
-v–
### ??[url=https://trassir-expert.ru/] Основные компоненты системы[/url] [url=https://trassir-expert.ru/]Trassir tr[/url]
Сердцем системы является **нейросетевой IP-видеорегистратор**, способный обрабатывать до 128 IP-камер с разрешением без ограничений. Ключевые характеристики:
– **Поддержка стандартов**: H.265, H.265+, H.264, MPEG4, MJPEG.
– **Производительность**: входящая и исходящая пропускная способность до 720 Мбит/с.
– **Хранение данных**: поддерживает установку до 8 жёстких дисков общей емкостью до 16 ТБ.
– **Интерфейсы**: 2 порта Gigabit Ethernet, выходы HDMI, DVI-D, DisplayPort с поддержкой разрешения до 4K.
– **Температурный режим**: устойчив к работе в диапазоне от +10°C до +30°C.
—
### ?? Какие проблемы решает [url=https://trassir-expert.ru/]Trassir tr[/url]?
Система Trassir помогает решать целый ряд актуальных задач современного бизнеса:
– **Повышение безопасности**: своевременное выявление угроз, предотвращение краж и мошеннических действий.
– **Оптимизация процессов**: контроль рабочего процесса, повышение эффективности труда сотрудников.
– **Управление рисками**: мониторинг соблюдения норм охраны труда и пожарной безопасности.
– **Улучшение клиентского опыта**: отслеживание очередей, оценка загруженности торговых точек.
—
### ?? Умная видеоаналитика на основе нейросетей
Одним из главных достоинств [url=https://trassir-expert.ru/]Trassir[/url] является уникальная платформа видеоаналитики, использующая мощные алгоритмы машинного обучения:
| Модуль | Функция |
|——————————-|————————————————————————————–|
| **Human Detector** | Определение присутствия людей в заданной зоне |
| **Face Recognition** | Распознавание и идентификация лиц |
| **AutoTRASSIR** | Автоматическое распознавание автомобильных номеров |
| **Queue Detector** | Мониторинг очередей и длина ожидания |
| **Crowd Detector** | Фиксация скоплений людей |
| **Face Mask Detector** | Контроль наличия защитных масок |
| **Social Distance Detector** | Соблюдение социальной дистанции |
| **Hardhat Detector** | Проверка наличия защитных касок |
| **Wear Detector** | Контроль специальной формы и экипировки |
| **Neuro Counter** | Подсчет посетителей и транспортных средств |
Эти модули позволяют минимизировать человеческий фактор и обеспечить максимальную точность мониторинга.
—
### ??? Надежность и удобство использования
Компания [url=https://trassir-expert.ru/]Trassir[/url] гарантирует высокое качество своей продукции и поддержку на всех этапах сотрудничества:
– **Гарантия 2 года** с возможностью продления.
– **Сервисные центры по всей России** с сертифицированными специалистами.
– **Индивидуальная техническая поддержка** и консультации квалифицированных инженеров.
– **Простота установки и настройки** благодаря интуитивно понятному интерфейсу программного обеспечения.
—
### ?? Преимущества для бизнеса
Использование систем [url=https://trassir-expert.ru/]Trassir[/url] приносит бизнесу реальную пользу:
– **Экономия затрат**: снижение убытков от краж и ошибок персонала.
– **Рост производительности**: эффективный контроль бизнес-процессов.
– **Безопасность сотрудников и клиентов**: постоянный мониторинг опасных ситуаций.
– **Легкость масштабирования**: простая интеграция новых устройств и расширение существующих систем.
—
### ?? Цифры и факты
– Более **1000 успешных проектов** реализовано по всей территории России.
– До **99% точности** распознавания автомобильных номеров.
– Возможность хранения видеозаписей объемом до **16 Терабайт**.
– Время отклика системы менее **1 секунды** на критически важные события.
—
### ? Почему выбирают [url=https://trassir-expert.ru/] Trassir[/url]?
– Российское производство, соответствующее государственным стандартам.
– Широкий выбор готовых и кастомных решений.
– Постоянное обновление и развитие платформы.
– Лучшее соотношение цены и качества на российском рынке.
—
### ?? Заключение
Система видеонаблюдения [url=https://trassir-expert.ru/]Trassir[/url] — это надежный партнер вашего бизнеса, обеспечивающий круглосуточную защиту активов, эффективное управление процессами и максимальный комфорт ваших сотрудников и клиентов. Сделав выбор в пользу Trassir, вы инвестируете в будущее своего предприятия, гарантируя себе уверенность и спокойствие завтра.
?? *Выбирайте лучшее — выбирайте [url=https://trassir-expert.ru/]Trassir[/url]!*
купить рольшторы цены [url=https://rulonnye-shtory-s-elektroprivodom11.ru/]rulonnye-shtory-s-elektroprivodom11.ru[/url] .
https://www.brownbook.net/business/54134734/купить-кокаин-банско/
https://git.project-hobbit.eu/fybogdcag
рулонные шторы с электроприводом купить в москве [url=https://elektricheskie-rulonnye-shtory90.ru/]https://elektricheskie-rulonnye-shtory90.ru/[/url] .
рулонные шторы на пластиковые окна с электроприводом [url=https://www.avtomaticheskie-rulonnye-shtory50.ru]https://www.avtomaticheskie-rulonnye-shtory50.ru[/url] .
https://rant.li/vmeuhybigabd/shri-lanka-kupit-kokain-mefedron-marikhuanu
https://jamsekbelge.bandcamp.com/album/adjust
can i buy generic accutane price
Medication information sheet. Short-Term Effects.
buy cephalexin price
Everything news about drugs. Get here.
Greetings!
[url=https://casinowins.cfd]sweet bonanza casino canada[/url]
Check out – https://casinowins.cfd/
Enjoy your gaming experience!
medicway https://images.google.tk/url?sa=t&url=https%3A%2F%2Fmedicway.shop medicway online mexican pharmacy
https://rant.li/bigydyabo/parizh-kupit-ekstazi-mdma-lsd-kokain
дизайнерский горшок [url=http://dizaynerskie-kashpo-rnd.ru]дизайнерский горшок[/url] .
¡Saludos!!
[url=https://digitalbetting.cfd/]juegos de casino ecuador[/url]
Lee este enlace – https://digitalbetting.cfd
casino con dinero real ecuador
juegos de casino ecuador
como jugar casino en linea con dinero real ecuador
¡Buena suerte!
вавада регистрация
https://kemono.im/pfebiubodq/gavana-kupit-gashish-boshki-marikhuanu
https://www.band.us/page/99488887/
https://imageevent.com/ulmanlooveon/kbfol
Medicament prescribing information. Long-Term Effects.
venlafaxine er trouble sleeping
Best news about medication. Read information here.
https://hoo.be/tybocycidu
https://community.wongcw.com/blogs/1126128/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83-%D0%A2%D0%B8%D1%80%D0%B0%D0%BD%D0%B0
Заказала с открыткой “на вырост” – все оценили креатив!
доставка цветов в томске
https://www.band.us/page/99534055/
https://hoo.be/feybmygyyhcf
https://ltalfa.ru
Розы в шляпной коробке с конфетами – два удовольствия в одном!
купить букет роз томск
https://psy-vasileva.ru
https://integral-msk.ru
Как приятно видеть, когда люди работают с такой страстью!
букет цветов томск
Slightly off the main thread here
A bit back I discovered a site called [url=https://talabout.com/] Talabout project[/url].
It’s full of real-life stories with people from all walks of life — deep and personal, not your typical media stuff.
Sometimes the vibe there reminds me of the stuff being shared here.
Could be worth a scroll for some of you?
https://t.me/s/B32_1WIN/43
https://oknapsk.online
¡Buen día!!
[url=https://livecasinogames.cfd/]casino online dinero real chile[/url]
Lee el enlace – https://livecasinogames.cfd/
casino en lГnea chile
888 casino chile
tu casino en casa chile
¡Buena suerte!
https://e3-studio.online
[url=https://www.google.sr/url?sa=t&url=https%3A%2F%2Fmedicway.shop]medicway[/url] online mexican pharmacy medicway medicway
https://livan-awdm.ru
Meds prescribing information. Short-Term Effects.
where to get cheap benicar pill
Actual news about medicament. Get information now.
buying generic myambutol online
https://crystal-tv.ru
https://citywolf.online
https://shatura-stupino.ru
вавада казино
https://t.me/s/B31_1WIN/20
Заказал в последний момент – собрали молниеносно!
букеты томск
https://rostokino-dez.online
https://montera-kurort.ru
[url=https://mexrxdirect.top/#]mexrxdirect[/url] mexrxdirect mexrxdirect online pharmacy without prescription
https://itravel-vl.ru
Medicine information sheet. Long-Term Effects.
where to get generic benicar price
Actual trends of medicines. Read here.
https://ooo-mitsar.online
https://ltalfa.ru
https://spm52.ru
https://cdo-aw.ru
https://schoolgraffiti.ru
https://crocus-opt.ru
https://shatura-stupino.ru
Pills information for patients. Long-Term Effects.
buying generic rogaine
All what you want to know about medicines. Read information now.
https://brightmemories.ru
Проверенные способы заработка в интернете
can you get generic benemid online
https://spm52.ru
вавада официальный сайт
pharmacy technician certification online https://mexrxdirect.top/# cvs online pharmacy costco online pharmacy
https://printbarglobal.ru
Топливные карты для юридических лиц
https://ooo-mitsar.online
Заказать Хавал – только у нас вы найдете разные комплектации. Быстрей всего сделать заказ на официальный дилер haval в москве можно только у нас!
[url=https://havalmsk1.ru]купить хавел в москве у официального дилера[/url]
сколько стоит haval – [url=http://www.havalmsk1.ru/]http://www.havalmsk1.ru/[/url]
https://telegra.ph/EHlektronasosnye-agregaty-dlya-molochnyh-zavodov-08-02
https://bestforum.forum-top.ru/viewtopic.php?id=3167#p5806
https://rostokino-dez.online
Rainbet
Сан-Висенте
https://kanscity.online
Топливные карты для юридических лиц
Drugs prescribing information. Effects of Drug Abuse.
can i buy dramamine
Actual about pills. Get information here.
https://telegra.ph/Pishchevye-filtry-i-kachestvo-molochnyh-produktov-08-02
https://rostokino-dez.online
https://alar8.online
https://treneramo.online
Might be a little off-topic 🙂
Just while searching organization tips I stumbled on a site https://kitchen-tips.chtonamstoit.site/.
It’s full of practical ideas to save time and space.
Some sections I liked most:
– Small kitchen organization
Also here’s [url=https://kitchen-tips.chtonamstoit.site]this kitchen hacks hub[/url] — definitely worth exploring!
What habits make your kitchen work better?
https://womanfan.ru/cardirin-tsena-i-effektivnost-ekspertnoe-mnenie-o-naturalnyh-kaplyah-ot-gipertonii/
https://vlgprestol.online
Фурор на мероприятии!
заказать цветы томск
Pills information sheet. Short-Term Effects.
can you buy diflucan online
Actual information about pills. Read information here.
https://crovlyagrad.online
вавада официальный сайт
Демидов
Букет для бизнес-партнера – произвел впечатление!
доставка цветов в томске
https://vintage-nsk.online
can you buy generic cipro pills
Йонава
https://treneramo.online
https://treneramo.online
Тамань
Свежесть – будто только что сорвали!
заказать цветы с доставкой в томске
https://kanscity.online
Medicine information. Long-Term Effects.
how can i get phenytoin without prescription
Best about medication. Read information here.
https://treneramo.online
https://www.google.ge/url?q=https://electronic-vignette.cz/ru
https://abz-istok.online
https://respublika1.online
Букет в шляпной коробке выглядел дорого и стильно – подруга была в восторге!
доставка цветов в томске
https://malyshok-m.ru/article/kak-my-pomogli-mame-pobedit-gipertoniyu-bez-aptek
https://oknapsk.online
казино вавада
блог по раскрутке
https://crovlyagrad.online
Губкинский
https://crovlyagrad.online
Meds prescribing information. What side effects?
can you buy generic sumatriptan tablets
Some what you want to know about drugs. Get information here.
Лусака
cost of generic clomid prices
https://abz-istok.online
Марн-Ла-Валле
¡Hola amigo!
[url=https://onlinepokerroom.cfd/]casino con dinero real chile[/url]
Lee este enlace – https://onlinepokerroom.cfd
casino con dinero real chile
juegos de casino con dinero real chile
888 casino chile
¡Buena suerte!
https://www.rwaq.org/users/youutalilsomeq-20250808234824
https://paper.wf/yfogtuyo/tallin-kupit-kokain-mefedron-marikhuanu
https://muckrack.com/person-27432173
Здарова!
[url=https://pokerstrategyhub.cfd/]проверенные онлайн казино с выводом денег казахстан[/url]
Переходи: – https://pokerstrategyhub.cfd/
онлайн казино кз
проверенные онлайн казино с выводом денег казахстан
казино онлайн в казахстане с бонусом за регистрацию
Бывай!
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%91%D0%BE%D1%88%D0%BA%D0%B8%20%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83%20%D0%93%D0%B0%D1%88%D0%B8%D1%88%20%D0%93%D1%83%D0%B4%D0%B0%D1%83%D1%80%D0%B8/
https://bio.site/fidaiibohj
https://pxlmo.com/mmajesteve
https://www.montessorijobsuk.co.uk/author/uhmzjubugoho/
https://pxlmo.com/tanaynuggi
https://ucgp.jujuy.edu.ar/profile/ecocifrda/
https://ucgp.jujuy.edu.ar/profile/raygubycaai/
https://odysee.com/@ektmalbiyoo
https://www.montessorijobsuk.co.uk/author/ofefedufycji/
Medicament information for patients. Generic Name.
can i purchase cheap zoloft without prescription
All trends of medicines. Get now.
https://hoo.be/kpocahefy
https://muckrack.com/person-27431871
https://www.band.us/page/99569977/
https://say.la/read-blog/123916
https://pxlmo.com/lucilleista.51
https://wanderlog.com/view/xotxzabmhk/
https://potofu.me/1u3r66b6
https://community.wongcw.com/blogs/1128078/%D0%9A%D0%B0%D1%83%D0%BD%D0%B0%D1%81-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D0%B0
casino vavada
https://allmynursejobs.com/author/uffmorningsun1992/
https://wanderlog.com/view/wlnfwhbiob/
online casino
References:
What Is Considered A High Roller – https://bom.so/Qy2kHd,
https://hoo.be/ocqigugidieh
https://www.passes.com/symepawipuxyze
Знаєте, як зробити [url=https://kitchen.justtips.online/]печиво без борошна[/url]? Це може бути чудовий варіант для людей, які дотримуються безглютенової дієти.
https://rant.li/04jr47loz1
накрутка в соц. сетях
https://git.project-hobbit.eu/edrahegehlo
https://bio.site/ifiignyofjef
https://allmynursejobs.com/author/toybonnieezios857/
Pills information for patients. Short-Term Effects.
how to get cheap cephalexin pill
Everything news about medicine. Get here.
https://wanderlog.com/view/ymowyxlvhu/
https://git.project-hobbit.eu/oduhduhub
l’achat d’ceftin
https://say.la/read-blog/123786
https://say.la/read-blog/124146
downtown casinos
References:
high (http://hikvisiondb.webcam/index.php?title=kincaidkrarup4402)
https://pxlmo.com/kvmrozbe
https://ucgp.jujuy.edu.ar/profile/myeidmicohe/
https://www.rwaq.org/users/zyoodelys-20250809144720
https://odysee.com/@aviorobis
https://paper.wf/lmzoybofyheb/zanzibar-kupit-kokain-mefedron-marikhuanu
https://pxlmo.com/regeneronius30
https://www.band.us/page/99544704/
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD%20%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83%20%D0%90%D1%83%D0%B3%D1%81%D0%B1%D1%83%D1%80%D0%B3/
1він додаток [url=https://www.1win40005.ru]https://www.1win40005.ru[/url]
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD%20%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83%20%D0%91%D0%B0%D1%82-%D0%AF%D0%BC/
https://hoo.be/gvdefafignsz
https://www.rwaq.org/users/lemonfunnygun619-20250808151315
https://ucgp.jujuy.edu.ar/profile/xadigufogidh/
Drug information sheet. Short-Term Effects.
order generic rogaine online
Everything news about meds. Get here.
¡Hola!
[url=https://casinogamesonline.cfd]400 reales a bolivianos casino[/url]
Lee este enlace – https://casinogamesonline.cfd
casino con dinero real bolivia
casino en bolivia
como jugar casino en linea con dinero real bolivia
¡Buena suerte!
https://bio.site/ddabahycae
Hey there!
Participate in our exciting live online gaming poker tournament and compete against skilled players from around the world. Our live online gaming poker tournament features multiple buy-in levels and guaranteed prize pools for every skill level. [url=https://livegamingonline.cfd]real money casino canada[/url] Register for the next live online gaming poker tournament and prove your skills while competing for substantial cash prizes.
Read the link – https://livegamingonline.cfd
casino apps for real money
real money casino online canada
online casino canada real money jackpot city
Enjoy!
https://odysee.com/@basseunruec4
https://paper.wf/fuhwacgu/solnechnyi-bereg-kupit-kokain-mefedron-marikhuanu
https://ucgp.jujuy.edu.ar/profile/dhvididi/
https://odysee.com/@Debbielady577
вавада зеркало
https://ucgp.jujuy.edu.ar/profile/yhiodrjohayf/
https://www.themeqx.com/forums/users/zjefoyifuhib/
https://www.montessorijobsuk.co.uk/author/offzibice/
Ваш курьер был так внимателен, будто доставлял семейную реликвию!
букеты томск
https://wanderlog.com/view/jdzfpezlmw/
http://cse.google.kz/url?sa=i&url=https://sk-digital-vignette.com/ru
https://muckrack.com/person-27418635
https://say.la/read-blog/123875
https://git.project-hobbit.eu/uceabebyed
http://www.google.am/url?q=https://sk-digital-vignette.com/ru
https://www.montessorijobsuk.co.uk/author/odeyefzuabiu/
https://www.band.us/page/99549294/
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%91%D0%BE%D1%88%D0%BA%D0%B8%20%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83%20%D0%93%D0%B0%D1%88%D0%B8%D1%88%20%D0%95%D0%BB%D0%B3%D0%B0%D0%B2%D0%B0/
Drugs prescribing information. Drug Class.
how to buy generic rizatriptan without rx
Some about meds. Get information now.
https://ucgp.jujuy.edu.ar/profile/gegycyadyhu/
https://say.la/read-blog/124241
https://odysee.com/@mambawohogcher
казино вавада
can i buy tadacip tablets
https://www.brownbook.net/business/54154011/коста-бланка-марихуана-гашиш-канабис/
Заказал розы для предложения руки и сердца – она сказала “ДА”!
купить букет роз томск
https://muckrack.com/person-27435550
https://rutzendrikc.bandcamp.com/album/button
https://pxlmo.com/uyageabaya
https://bio.site/ifodsehohoi
https://www.brownbook.net/business/54151637/пловдив-марихуана-гашиш-канабис/
¡Buen día!
[url=https://casinogamesonline.cfd]400 reales a bolivianos casino[/url]
Lee este enlace – https://casinogamesonline.cfd
como jugar casino en linea con dinero real bolivia
casino en lГnea dinero real bolivia
casino online bolivia
¡Buena suerte!
https://rant.li/nohdycudug/benidorm-kupit-gashish-boshki-marikhuanu
casino vavada
https://git.project-hobbit.eu/qgeobigoceh
https://bio.site/ogxihoecquib
https://www.band.us/page/99570047/
Pills information for patients. Drug Class.
can you buy cheap levaquin no prescription
Everything trends of medicine. Get information here.
https://say.la/read-blog/124231
https://rant.li/tkzacoughuh/al-meriia-kupit-gashish-boshki-marikhuanu
https://ucgp.jujuy.edu.ar/profile/ucodecydy/
https://wanderlog.com/view/syvqyfctww/
https://www.montessorijobsuk.co.uk/author/qoebnidahe/
вавада играть
https://hub.docker.com/u/glowaloeckiz
dianabol winstrol cycle
References:
first dianabol cycle (https://cerealhead9.bravejournal.net/check-e-deca-dbol-cycle-australian-bodybuilding-and-health-discussion-board)
https://www.rwaq.org/users/jacquelinegloverjac-20250809012027
С какими болезнями не берут в армию? Катаракта или глаукома – зрение решает многое.
http://www.goroserver.shop:80/wiki/index.php/%E5%88%A9%E7%94%A8%E8%80%85:EnriqueBalke91
https://www.passes.com/munezaeunja
https://www.brownbook.net/business/54152905/ханой-марихуана-гашиш-канабис/
https://wanderlog.com/view/znpnzmsocv/
https://pxlmo.com/goncuroussa
https://hoo.be/giugucnack
Drugs information. Effects of Drug Abuse.
can you buy generic inderal for sale
Best what you want to know about medicines. Read information here.
С какими болезнями не берут в армию? Психические расстройства, вроде циклотимии, освобождают.
https://yogicentral.science/wiki/Bolezni_13b
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD%20%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83%20%D0%9C%D0%B0%D0%BD%D1%87%D0%B5%D1%81%D1%82%D0%B5%D1%80/
вавада
1 win moldova [url=http://1win40009.ru/]http://1win40009.ru/[/url]
https://paper.wf/eihahuyhg/pattaiia-kupit-ekstazi-mdma-lsd-kokain
https://bio.site/ecibycae
1win.com официальный сайт [url=www.1win1162.ru]www.1win1162.ru[/url]
https://www.band.us/page/99562299/
https://rant.li/zuguycyu/kotor-kupit-gashish-boshki-marikhuanu
where to get lipitor without rx
[url=https://canadianpharmeasy.shop/#]canadianpharmeasy[/url] costco online pharmacy costco online pharmacy canadianpharmeasy
https://www.brownbook.net/business/54152911/орлеан-кокаин-мефедрон-марихуана/
https://wanderlog.com/view/nuopwqkpqk/
Туризм, наука, спорт – усе в одному місці! Заходьте на [url=https://xyzdigitalmedia.com/]публікації цієї команди[/url].
https://allmynursejobs.com/author/yukkakogeocool/
casino vavada
С какими болезнями не берут в армию? Лейкемия и другие болезни крови – сразу не берут.
https://wiki.lovettcreations.org/index.php/User:JadaSnowden09
https://paper.wf/igodycpd/gannover-kupit-kokain-mefedron-marikhuanu
https://say.la/read-blog/124116
https://t.me/s/TopGo1WIN
https://potofu.me/bveh51zg
https://t.me/s/TopGo1WIN
https://ucgp.jujuy.edu.ar/profile/juchycobade/
С какими болезнями не берут в армию? Тяжелая форма ожирения – повод для комиссии.
http://wiki.naval.ch/index.php?title=Benutzer:TaylahTill1
https://potofu.me/2bduh9js
Pills prescribing information. Long-Term Effects.
get generic dilantin without dr prescription
Some information about medicine. Get information now.
https://www.band.us/page/99556824/
https://muckrack.com/person-27420390
https://www.rwaq.org/users/deansoribstar-20250809010938
https://allmynursejobs.com/author/bigbossdancingman0/
вавада казино
https://say.la/read-blog/124256
https://community.wongcw.com/blogs/1128051/%D0%91%D1%80%D1%8E%D1%81%D1%81%D0%B5%D0%BB%D1%8C-%D0%90%D0%BC%D1%84%D0%B5%D1%82%D0%B0%D0%BC%D0%B8%D0%BD-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8
Ваши весенние композиции – как глоток свежести!
доставка цветов томск
https://hoo.be/yfqogody
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8%20%D0%9C%D0%94%D0%9C%D0%90%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%9E%D0%BB%D0%BE%D0%BC%D0%BE%D1%83%D1%86/
https://potofu.me/z34uypay
https://paper.wf/shyccobuhyc/likhtenshtein-kupit-kokain-mefedron-marikhuanu
Хай!
Лучшие онлайн казино в Узбекистане проверены временем. [url=https://casinostrategies.cfd/]онлайн казино ташкент[/url] Они предлагают честную игру.
Написал: – https://casinostrategies.cfd
онлайн казино uz
можно ли играть в онлайн казино в узбекистане
лучшие онлайн казино в узбекистане
Покеда!
С какими заболеваниями не берут в армию? Проблемы с щитовидкой, вроде гипертиреоза, учитываются.
http://www.annunciogratis.net/author/raymonhende
https://www.rwaq.org/users/moorefashion16-20250809094100
vavada казино
Hi!
Best online casino in India guarantees fair play. [url=https://blackjackpro.cfd/]online casino india real money[/url] Win real money today.
Check this out – https://blackjackpro.cfd/
online casino in india is legal
online gambling in india
best online casino in india
Enjoy!
https://www.brownbook.net/business/54152913/саранда-кокаин-мефедрон-марихуана/
https://paper.wf/kiguhubebeb/zeliona-gura-kupit-ekstazi-mdma-lsd-kokain
https://pxlmo.com/gentleEarlinebrightEarlineme13
Drug prescribing information. Long-Term Effects.
lasix to spironolactone ratio in cirrhosis
All news about drug. Read information now.
https://community.wongcw.com/blogs/1128552/%D0%9A%D0%BE%D1%81%D1%82%D0%B0-%D0%91%D1%80%D0%B0%D0%B2%D0%B0-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D0%B0-%D0%93%D0%B0%D1%88%D0%B8%D1%88-%D0%9A%D0%B0%D0%BD%D0%B0%D0%B1%D0%B8%D1%81
https://hub.docker.com/u/jonatevropi
https://paper.wf/cuiadogu/belgrad-kupit-gashish-boshki-marikhuanu
https://allmynursejobs.com/author/tanyaanglin9733/
https://www.montessorijobsuk.co.uk/author/uycwifafy/
Аромат ваших цветов наполняет дом атмосферой гармонии и уюта!
заказ цветов томск
https://www.montessorijobsuk.co.uk/author/nfjofhod/
вавада зеркало
protonix knee brace for sale
https://www.band.us/band/99544361/
https://odysee.com/@dartmotown_1992
https://paper.wf/raygqofugu/praga-kupit-gashish-boshki-marikhuanu
Букет для мамы получился просто шикарный.
доставка цветов томск
https://git.project-hobbit.eu/oaocxefyf
https://allmynursejobs.com/author/sevvenrichterovamew/
https://bio.site/wzyhudeecifo
Medicines information sheet. Cautions.
where buy rogaine pills
Some what you want to know about pills. Read information here.
https://www.rwaq.org/users/carlosjonescar-20250809012644
mobila din lemn la comanda [url=1win40012.ru]1win40012.ru[/url]
https://www.brownbook.net/business/54154007/андорра-амфетамин-кокаин-экстази/
https://www.band.us/page/99561646/
https://muckrack.com/person-27427588
https://www.montessorijobsuk.co.uk/author/yboociii/
https://paper.wf/lougefagy/piza-kupit-ekstazi-mdma-lsd-kokain
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD%20%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83%20%D0%A2%D1%80%D0%BE%D0%BC%D1%81%D1%91/
https://gjutaizarbe.bandcamp.com/album/blaze
https://wanderlog.com/view/wlnfwhbiob/
https://www.band.us/band/99545918/
https://odysee.com/@mantkalqisi
https://say.la/read-blog/123564
https://www.band.us/page/99561945/
Medicament information leaflet. Long-Term Effects.
how can i get coumadin tablets
Everything what you want to know about medicine. Read information here.
https://www.montessorijobsuk.co.uk/author/ohehyhaa/
https://hub.docker.com/u/HollyCrawfordHol
https://ucgp.jujuy.edu.ar/profile/hudedabaiga/
https://rant.li/ucdufohr/ibitsa-kupit-kokain-mefedron-marikhuanu
https://www.band.us/page/99558178/
https://potofu.me/gt26st7b
креативные кашпо [url=dizaynerskie-kashpo-nsk.ru]креативные кашпо[/url] .
https://bio.site/yehnogou
can i purchase cheap baclofen pills
подготовка проекта перепланировки [url=proekt-pereplanirovki-kvartiry4.ru]proekt-pereplanirovki-kvartiry4.ru[/url] .
https://paper.wf/xgygeueg/niachang-kupit-kokain-mefedron-marikhuanu
https://hoo.be/agobcyyhuhu
https://ucgp.jujuy.edu.ar/profile/ibohofeg/
https://ucgp.jujuy.edu.ar/profile/duigegiiduo/
Meds information sheet. Effects of Drug Abuse.
buy nortriptyline pills
All about drugs. Read information now.
https://hoo.be/nudobiycrooc
проект перепланировки для согласования цена [url=http://proekt-pereplanirovki-kvartiry4.ru]проект перепланировки для согласования цена[/url] .
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8%20%D0%9C%D0%94%D0%9C%D0%90%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%A2%D0%B0%D1%80%D1%82%D1%83/
электрический карниз для штор купить [url=https://elektrokarnizy33.ru]https://elektrokarnizy33.ru[/url] .
https://maredliliq.bandcamp.com/album/billboard
https://ucgp.jujuy.edu.ar/profile/odibiohq/
https://hoo.be/uigebedu
https://hub.docker.com/u/nosovamaaza
электрокарнизы для штор купить в москве [url=http://elektrokarniz11.ru/]http://elektrokarniz11.ru/[/url] .
https://www.brownbook.net/business/54152806/паралимни-кокаин-мефедрон-марихуана/
https://www.band.us/page/99563310/
I recommend https://ancientcivs.ru/
https://hub.docker.com/u/Liberatibee
Вирішив розмістити рекламу у них і не пожалкував! [url=https://xyzdigitalmedia.com/]Майданчик дуже ефективний[/url], трафік цільовий.
https://bio.site/byugogza
https://community.wongcw.com/blogs/1128403/%D0%9F%D1%83%D0%BB%D0%B0-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D0%B0
https://rant.li/qnnlsukfns
https://hoo.be/ubofafiib
Medicament information leaflet. Long-Term Effects.
can you take amitriptyline with amlodipine
Some about drug. Read here.
https://git.project-hobbit.eu/qgeobigoceh
https://wanderlog.com/view/ygyyugdmhb/
электрокарнизы цена [url=https://elektrokarnizy-dlya-shtor150.ru/]https://elektrokarnizy-dlya-shtor150.ru/[/url] .
электрический карниз для штор купить [url=https://elektrokarniz-nedorogo.ru]https://elektrokarniz-nedorogo.ru[/url] .
sex
https://wanderlog.com/view/xcftnxrrtj/
https://rant.li/ryfydyce/nant-kupit-kokain-mefedron-marikhuanu
https://odysee.com/@hfzwijten
https://paper.wf/xoahybofw/marianske-lazne-kupit-ekstazi-mdma-lsd-kokain
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD%20%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83%20%D0%A3%D1%82%D1%80%D0%B5%D1%85%D1%82/
https://paper.wf/igyczcudy/osaka-kupit-gashish-boshki-marikhuanu
https://gujjujanah.bandcamp.com/album/batter
https://say.la/read-blog/123565
https://git.project-hobbit.eu/dneagehudg
https://www.brownbook.net/business/54152350/краков-амфетамин-кокаин-экстази/
Цветы пришли свежими, несмотря на летний зной!
Этот информативный текст выделяется своими захватывающими аспектами, которые делают сложные темы доступными и понятными. Мы стремимся предложить читателям глубину знаний вместе с разнообразием интересных фактов. Откройте новые горизонты и развивайте свои способности познавать мир!
Узнать напрямую – https://imena-mj.ru/lechenie-zapoya-kak-vernut-sebe-kontrol-nad-zhiznyu.html
order imdur without prescription
https://www.montessorijobsuk.co.uk/author/wdlifofsva/
https://odysee.com/@nuestrifky51
https://www.band.us/page/99551167/
конструкция ГБЦ двигателя 11182
https://www.brownbook.net/business/54152317/люблин-марихуана-гашиш-канабис/
https://www.band.us/page/99549294/
Medicines information sheet. Cautions.
how can i get cheap minocycline without dr prescription
Actual about drug. Read here.
https://rant.li/fogedihk/kos-kupit-kokain-mefedron-marikhuanu
https://www.themeqx.com/forums/users/zugehohz/
https://rant.li/op7wrv3316
https://rant.li/xygufodpkif/petrovats-kupit-ekstazi-mdma-lsd-kokain
https://odysee.com/@blackprinceborne13
What’s up!
Nigeria online casino offers excitement. [url=https://livedealeronline.cfd/]online casinos nigeria[/url] Play safely from home today.
Read the link – https://livedealeronline.cfd/
online casinos nigeria
best casino app in nigeria
casino in nigeria
Have a great day!
https://hoo.be/icefycad
https://www.band.us/page/99561511/
https://sites.google.com/view/shatc/viniets
https://nkindimajaly.bandcamp.com/album/board
¡Saludos!
Cada juego casino real paga premios verdaderos. [url=https://smartphonecasino.cfd/]casino online dinero real mГ©xico[/url] Encuentra tu juego favorito ahora.
Lee este enlace – https://smartphonecasino.cfd/
casino online dinero real mГ©xico
casino en lГnea confiable
juego casino real
¡Buena suerte!
https://odysee.com/@esther890beauty
https://pxlmo.com/woodardm454smart
https://allmynursejobs.com/author/nhoas33badxkd/
https://hub.docker.com/u/crutelhadja
https://say.la/read-blog/123563
https://paper.wf/euhobefigjec/iassy-kupit-gashish-boshki-marikhuanu
Medicines information. Effects of Drug Abuse.
azithromycin pulmonary hypertension
Actual about medicament. Read information here.
https://muckrack.com/person-27433371
https://ucgp.jujuy.edu.ar/profile/sbagdiheof/
https://bio.site/yhmoyyfgyh
https://potofu.me/2zbrxivf
https://www.band.us/page/99566982/
https://www.montessorijobsuk.co.uk/author/nfjofhod/
https://bio.site/didifocabid
sex
https://rant.li/lggudagafr/keiptaun-kupit-gashish-boshki-marikhuanu
Pills information sheet. Drug Class.
duloxetine capsule 16mm
Some news about drug. Get information now.
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD%20%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D1%83%20%D0%A1%D0%B0%D1%80%D0%B0%D0%BD%D0%B4%D0%B0/
https://git.project-hobbit.eu/jxoudehyho
Drug information sheet. Long-Term Effects.
can you buy fexofenadine pills
Actual what you want to know about pills. Get information now.
https://muckrack.com/person-27431686
https://slavas-superb-site-64abbb.webflow.io/
https://say.la/read-blog/123658
https://bio.site/didifocabid
https://cz.pinterest.com/bigcitylife111/%D0%B2%D0%B8%D0%BD%D1%8C%D0%B5%D0%BA%D1%82%D0%B8/
https://odysee.com/@rockbackmrtwix1992
https://odysee.com/@roseMeyeristaMeyerstar17122000
https://say.la/read-blog/124144
https://www.montessorijobsuk.co.uk/author/pabifiyf/
https://www.montessorijobsuk.co.uk/author/igfmygobwi/
Medicines information leaflet. Effects of Drug Abuse.
how to get cheap nolvadex pill
Actual information about drugs. Read now.
https://www.rwaq.org/users/zeihunayshi-20250808151158
https://bio.site/ofedoyhuo
https://hub.docker.com/u/crutelhadja
https://rant.li/nuigoeoblo/kipr-kupit-kokain-mefedron-marikhuanu
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8%20%D0%9C%D0%94%D0%9C%D0%90%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%9A%D0%BE%D0%BD%D1%81%D1%82%D0%B0%D0%BD%D1%86%D0%B0/
https://wanderlog.com/view/bbntuzfwzs/
https://www.band.us/page/99568726/
https://hub.docker.com/u/convereanu
https://ucgp.jujuy.edu.ar/profile/ohohhygebe/
¡Hola!
888 casino chile ha establecido nuevos estГЎndares en la industria del juego online con su plataforma innovadora. [url=https://jackpotwins.shop/]casino con dinero real chile[/url] Descubre por quГ© 888 casino chile es la elecciГіn preferida de jugadores experimentados en todo el paГs.
Lee este enlace – https://jackpotwins.shop/
casino online dinero real chile
¡Buena suerte!
https://say.la/read-blog/123720
Medication information for patients. What side effects can this medication cause?
can i purchase cheap erythromycin tablets
Best information about medication. Read here.
https://git.project-hobbit.eu/eicifedi
https://www.montessorijobsuk.co.uk/author/mpadoacyg/
https://hoo.be/agobcyyhuhu
https://odysee.com/@hfzwijten
https://allmynursejobs.com/author/maddakotak/
https://wanderlog.com/view/sjqgwrtidi/
https://www.band.us/page/99566915/
https://rant.li/827faigs1d
Drug prescribing information. Long-Term Effects.
how to buy cheap paxil without rx
Best what you want to know about drug. Get here.
https://pxlmo.com/creidebilcan
https://git.project-hobbit.eu/pafyiobxue
https://pxlmo.com/chafaaprt
https://hub.docker.com/u/karaimorja
https://muckrack.com/person-27433388
https://rant.li/xjboidyhe/perudzha-kupit-ekstazi-mdma-lsd-kokain
https://allmynursejobs.com/author/alexandrialangale/
https://www.montessorijobsuk.co.uk/author/ediudyihjybi/
Medicines information sheet. Brand names.
uses and side effects of hydroxyzine
All trends of meds. Read here.
Medicament information sheet. Generic Name.
cost of valtrex pill
Some what you want to know about medicine. Read information here.
https://www.themeqx.com/forums/users/fkihocaby/
https://www.rwaq.org/users/remeyscalog5-20250808151409
https://beteiligung.stadtlindau.de/profile/%D0%9A%D1%83%D0%BF%D0%B8%D1%82%D1%8C%20%D0%AD%D0%BA%D1%81%D1%82%D0%B0%D0%B7%D0%B8%20%D0%9C%D0%94%D0%9C%D0%90%20%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD%20%D0%AD%D1%88%D1%82%D0%BE%D1%80%D0%B8%D0%BB/
https://odysee.com/@shemenniasse
https://bio.site/royduhycag
https://ucgp.jujuy.edu.ar/profile/ydibagtoc/
https://pxlmo.com/najdenleau
https://wanderlog.com/view/qwokgoemzl/
https://community.wongcw.com/blogs/1128244/%D0%9A%D0%B5%D0%BC%D0%B5%D1%80-%D0%9A%D0%BE%D0%BA%D0%B0%D0%B8%D0%BD-%D0%9C%D0%B5%D1%84%D0%B5%D0%B4%D1%80%D0%BE%D0%BD-%D0%9C%D0%B0%D1%80%D0%B8%D1%85%D1%83%D0%B0%D0%BD%D0%B0
Medicament prescribing information. Generic Name.
where to get cheap requip
Everything news about drugs. Get information here.
https://muckrack.com/person-27437260
https://ucgp.jujuy.edu.ar/profile/fhouhoabaug/
https://muckrack.com/person-27427271
https://pxlmo.com/gavroyjerz
https://www.themeqx.com/forums/users/abibigodah/
https://ucgp.jujuy.edu.ar/profile/kygnlpud/
Drugs information leaflet. What side effects can this medication cause?
famotidine is for what
All information about medication. Read now.
https://hub.docker.com/u/oraguiohora
https://allmynursejobs.com/author/orjonamnani/
https://allmynursejobs.com/author/otuyaoseida/
Medicines information for patients. Cautions.
can you get generic coumadin for sale
Best news about medicament. Get here.
映画を楽しむ方々へ、テーマ別の厳選された映画リストを提供するサイトをご紹介します。掲載されている全作品にトレーラー動画とポスター画像が付随しており、次に見る映画を選ぶ際の参考としてご活用いただけます。各作品のAmazonページへのアクセスも容易で、、必要な情報をワンストップで得られます。膨大な作品群から好みの一本を見つける手助けとなるでしょう。https://www.awwwards.com/eigamaster/
электрокарниз недорого [url=http://elektrokarnizy-dlya-shtor150.ru/]http://elektrokarnizy-dlya-shtor150.ru/[/url] .
https://allmynursejobs.com/author/lopezlopezmaylopez2512/
https://muckrack.com/person-27435084
https://punkgazetka.forum24.ru/?1-9-0-00003850-000-0-0-1752292292
https://xn--90anba0aflei4gua.xn--p1ai/
https://bio.site/tsadyuyfa
http://devichnik.su/forum/39-26276-1
https://www.montessorijobsuk.co.uk/author/ibafufyby/
https://www.montessorijobsuk.co.uk/author/odicpuhhigo/
https://ucgp.jujuy.edu.ar/profile/jihigcpieda/
электрокарниз москва [url=http://www.elektrokarniz-nedorogo.ru]http://www.elektrokarniz-nedorogo.ru[/url] .
https://rant.li/zg69ntlfq8